
Программное обеспечение
В начало справки ⇡
Для практической работы вам понадобится открытая программа CloudCompare. Информацию о ней можно найти на домашнем сайте, там же можно скачать себе дистрибутив программы. Для этого выберите Latest stable release (2.11.3 Anoia) – Windows iconWindows 64 bits Stereo.
Также для работы нам потребуется ГИС-пакет с открытым исходным кодом SAGA, который можно скачать по ссылке. Программа не требует установки.
Работа с ТЛО в CloudCompare
В начало справки ⇡
В программе через меню File – Open откройте ваш фрагмент облака точек. Для того чтобы точки облака приобрели цвет (скаляр), указываем, что переменной цвета соответствует координата Z. Для этого вызываем меню Edit – Scalar Fields — Export coordinates to SF и выбираем координату.
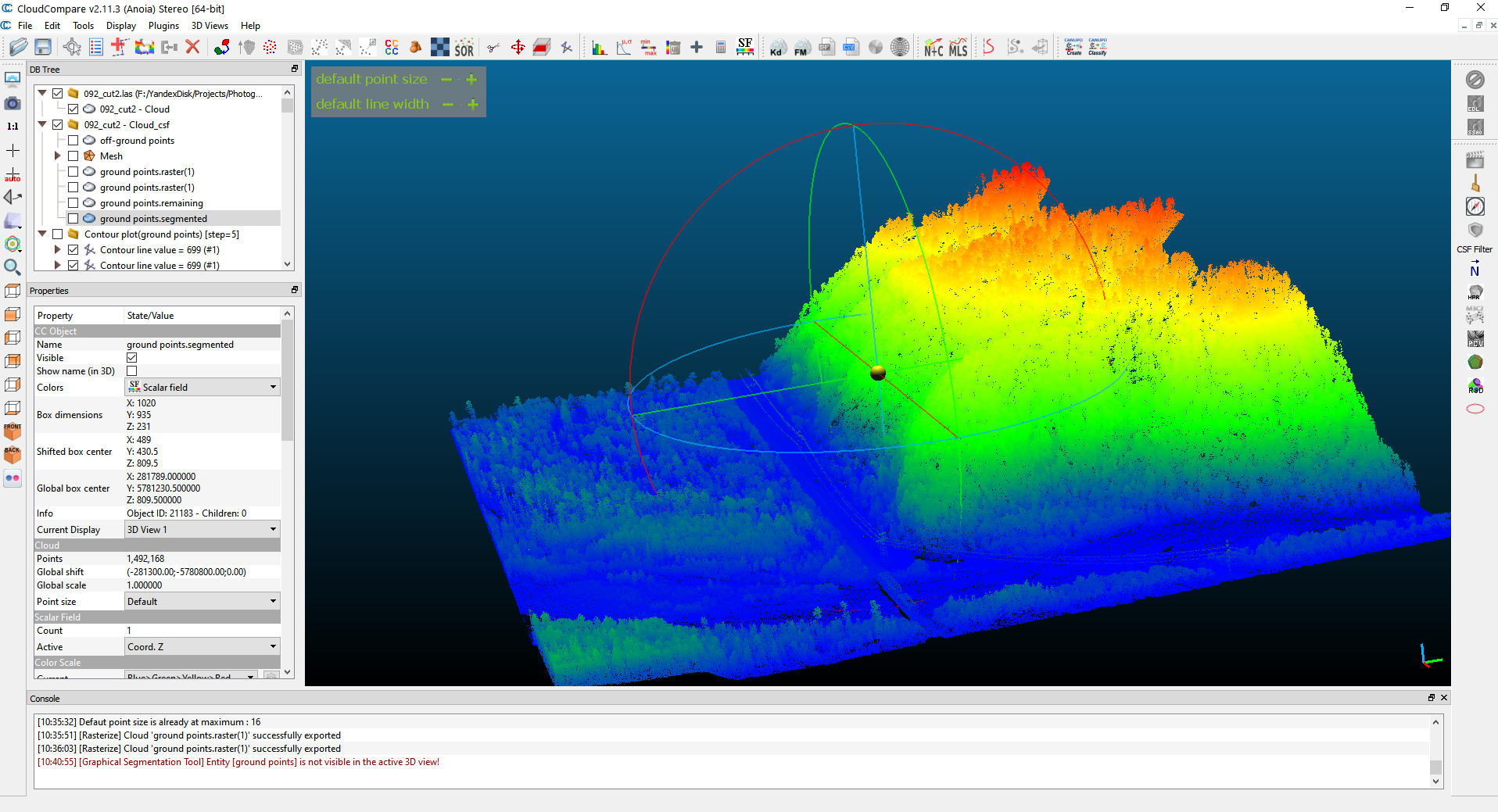
Облако точек с настроенным скалярным значением
Для классификации облака точек на точки земли и точки всего остального вызываем меню Plugins – CSF Filter. В Advanced parameters обязательно укажите параметр cloth resolution (разрешение).Результат классификации добавится в виде отдельных облаков точек.
С помощью инструмента Segment можно вырезать объекты типа дорог и рек. Для этого нарисуйте полигон, ставя узлы левой кнопкой мыши. Замыкание полигона осуществляется нажатием правой кнопки мыши. После отрисовки участка, который необходимо очистить от ТЛО, выберите на панели кнопку Segment Out. В результате у вас появятся новые поднаборы облаков точек в списке слоёв слева.
Для получения растровой поверхности, горизонталей и mesh-модели используется кнопка на главной панели, либо вызывается меню Tool – Projection – Rasterize. В открывшемся окне укажите разрешение растра step – 1, ось координат для проекции direction – Z, размер ячейки укажите минимальный cell height – minimum, а также передискретизация resample input cloud – checked. пустые ячейки оставьте пустыми Empty cells fill with – leave empty.
Окно настроек растеризации
Для запуска процесса растеризации нажмите на кнопку Raster и укажите путь для сохранения файла GeoTIFF. Опционально вы можете построить горизонтали Contour plot.
Обработка данных в QGIS
В начало справки ⇡
При открытии в QGIS для поверхности, соответствующей земле выполните заполнение пустых ячеек инструментом Raster – Analysis – Fill nodata….
Для нахождения высоты объектов над рельефом можно воспользоваться калькулятором растров и вычесть одну поверхность из другой.
В QGIS доступны некоторые инструменты автоматизированного упрощения геометрии, что применимо к автоматически построенным горизонталям. Выберите в главном меню Vector – Geometry Tools – Simplify…. Откроется инструмент, упрощающий геометрию объектов. Для линейных объектов рекомендуется выбирать алгоритм Дугласа-Пейкера.
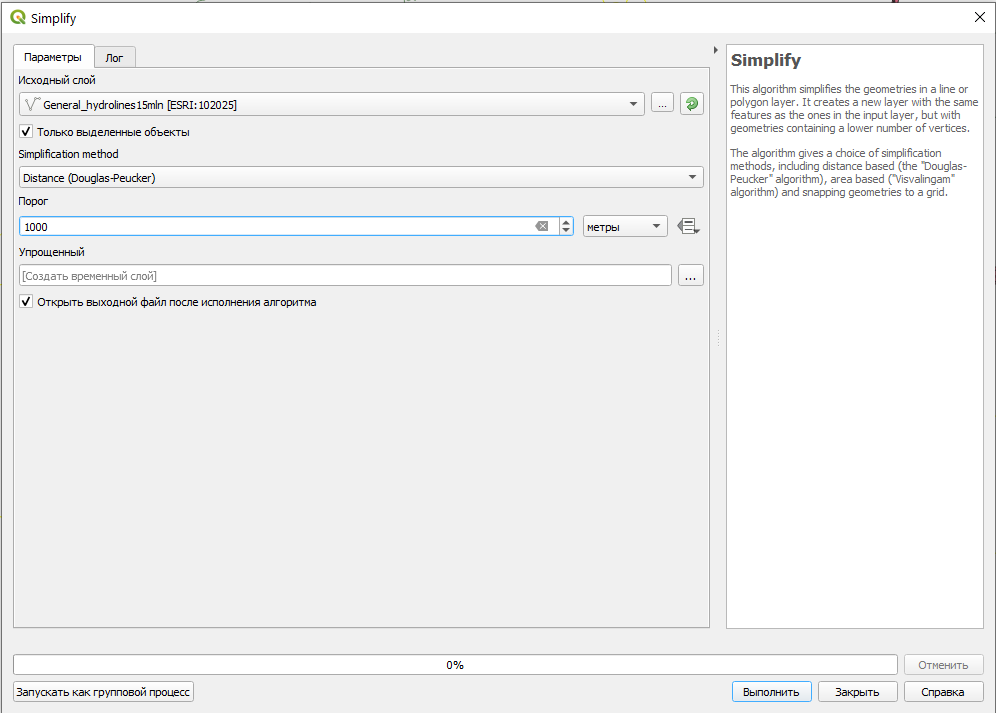
Окно инструмента упрощения
Данный алгоритм убирает вершины согласно заданному порогу, который устанавливается пользователем на основе масштаба и детализации исходных данных.
В QGIS есть инструмент для сглаживания векторных объектов. Для его использования нужно открыть окно Processing и в нём найти инструмент Vector Geometry – Smooth.
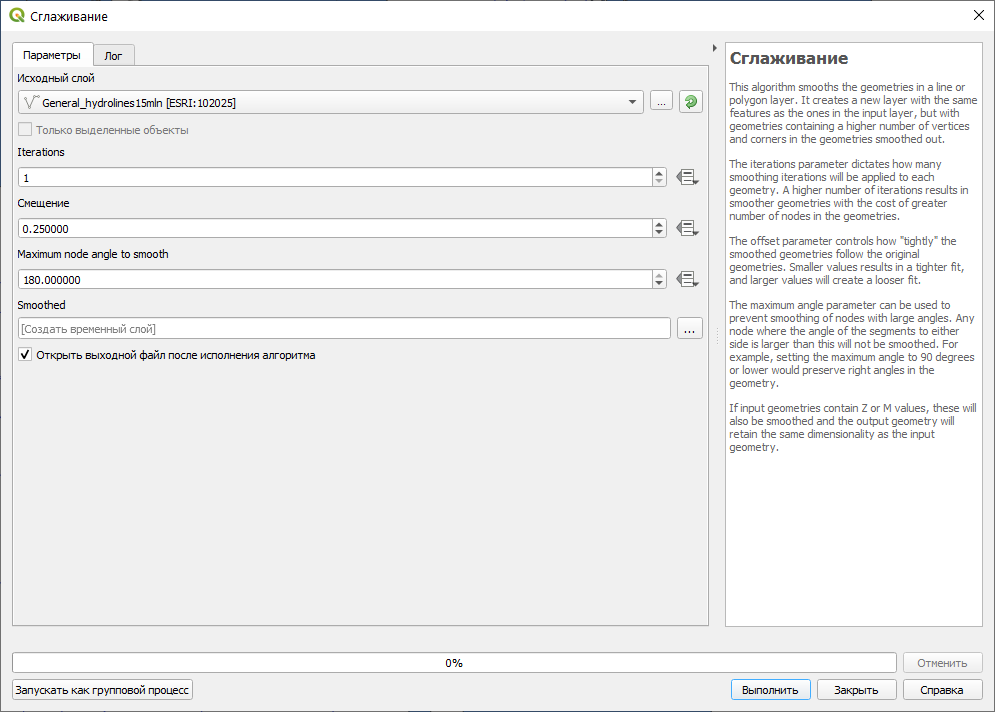
Окно инструмента сглаживания
Обратите внимание, что оба инструмента не изменяют текущий слой, а создают новый.
Упрощение и сглаживание объектов доступно в индивидуальном порядке в текущем слое на панели инструментов дополнительной оцифровки. Выбрав редактируемый слой в режиме редактирования, нажмите на кнопку , после чего кликните по объекту, который вы хотите упростить. Откроется маленькое окошко, в котором можно выбрать метод сглаживания, либо упрощения.
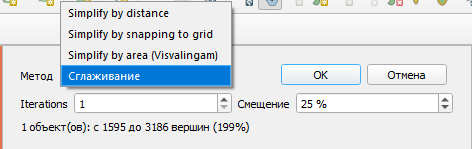
Окно выбора метода упрощения и сглаживания
Карпачевский А.М. Основы дистанционного зондирования и фотограмметрии. М.: Географический факультет МГУ, 2024.
В следующей статье мы рассмотрим CloudCompare. Это программное обеспечение для обработки трехмерных облаков точек и треугольной сетки. Цель этого приложения — провести сравнение двух плотных трехмерных облаков точек, например, полученных с помощью лазерного сканера. Кроме того, он также предназначен для сравнения облака точек и треугольной сетки. CloudCompare и ccViewer в настоящее время работают в системах Gnu / Linux, Windows и macOS. Программа выпущена под лицензией GNU General Public License (GPL), поэтому пользователь может использовать их для любых целей.
Благодаря обновлениям CloudCompare стал более универсальное программное обеспечение для обработки облаков точек, включая множество передовых алгоритмов как: rРегистрация, повторная выборка, манипуляции с цветным / нормальным / скалярным полем, статистические вычисления, управление датчиками, интерактивное или автоматическое нацеливание, улучшение визуализации. и еще кое-что.
Эта программа была первоначально создана в результате сотрудничества между Telecom ParisTech и отделом исследований и разработок EDF. Проект CloudCompare стартовал в 2003 году, когда Даниэль Жирардо-Монто получил докторскую степень по обнаружению изменений в трехмерных геометрических данных. В то время его основной целью было быстрое обнаружение изменений в трехмерных облаках точек высокой плотности, полученных с помощью лазерных сканеров на промышленных объектах или строительных площадках. Позже он превратился в более общее и продвинутое программное обеспечение для обработки 3D-данных. Теперь это автономный проект с открытым исходным кодом и бесплатное программное обеспечение.

- CloudCompare предоставляет набор основных инструментов для ручного редактирования и рендеринга трехмерных облаков точек и треугольных сеток. Он также предлагает несколько расширенных алгоритмов обработки, включая методы для выполнения:
-
- Прогнозы (на основе раскручивающихся осей, цилиндров или конуса, …)
- Записывать (ICP, …)
- Расчет расстояния (cloud-cloud или cloud-mesh расстояние от ближайшего соседа, …)
- Статистический расчет (пространственный тест Хи-квадрат, …)
- Сегментация (маркировка подключенных компонентов, основанная на прямом распространении, …)
- Оценка геометрических характеристик (плотность, кривизна, шероховатость, ориентация геологической плоскости, …)
- CloudCompare может обрабатывать неограниченное количество скалярных полей для каждого облака точек, к которому могут применяться различные специализированные алгоритмы (сглаживание, оценка градиента, статистика и т. д.). Система динамического воспроизведения цвета помогает пользователю эффективно визуализировать скалярные поля для каждой точки.
- Пользователь сможет интерактивно сегментировать 3D-объекты (с 2D-полилинией, нарисованной на экране), интерактивно вращать / перемещать один или несколько объектов относительно других, интерактивно выбирать отдельные точки или пары точек (чтобы получить длину соответствующего сегмента) или точечные тройки (чтобы получить угол и плоскость, соответствующие нормальности). Последняя версия также поддерживает создание 2D-меток, прикрепленных к точкам или аннотациям прямоугольных областей.
- Механизм подключаемых модулей позволяет еще больше расширить возможности CloudCompare.
Установите CloudCompare в Ubuntu
Чтобы установить CloudCompare в Ubuntu, пользователи могут использовать пакет Flatpak, который можно найти в плоская ступица. Если вы используете Ubuntu 20.04 и в вашей системе по-прежнему не включена эта технология, вы можете продолжить гид что коллега написал в этом блоге некоторое время назад.
Когда вы сможете установить эти типы приложений на свой компьютер, вам нужно будет только открыть терминал (Ctrl + Alt + T) и запустить следующее команда установки:
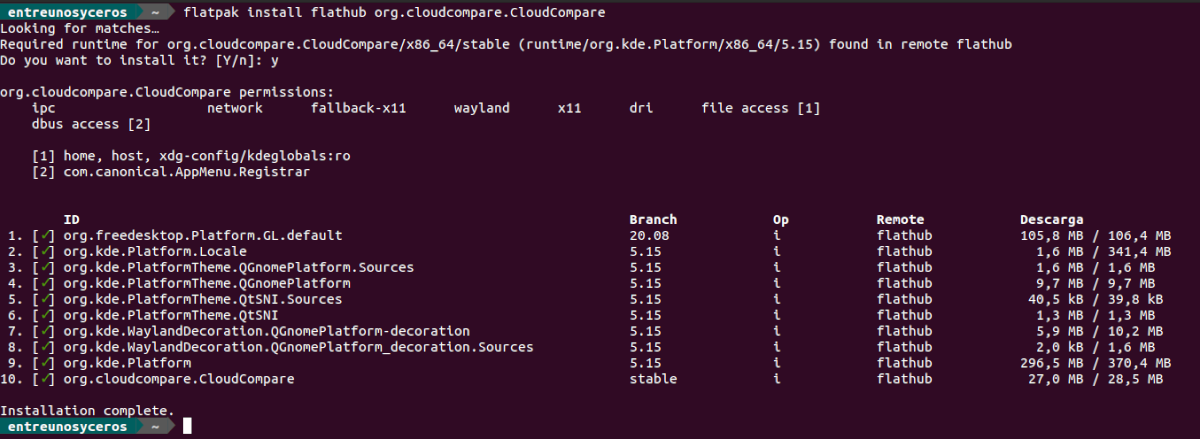
flatpak install flathub org.cloudcompare.CloudCompare
После завершения установки вы можете запустить программу ищем соответствующий лаунчер на нашем компьютере, хотя команду можно записать и в терминале:

flatpak run org.cloudcompare.CloudCompare
деинсталляция
к удалить эту программу, необходимо только открыть терминал (Ctrl + Alt + T) и выполнить в нем следующую команду:

flatpak uninstall org.cloudcompare.CloudCompare
CloudCompare — бесплатное программное обеспечение (Хотя платить за программное обеспечение не обязательно, его разработчики приветствуют пожертвования от тех пользователей, которые считают его полезным.). По любым вопросам, сообщениям об ошибках или предложениям пользователи могут проверить форум проекта, его хранилище на Github или сайт проекта.
Время на прочтение6 мин
Количество просмотров4.1K
Наш маленький стартап решил испытать силы в трёхмерном моделировании городской инфраструктуры. Стоит сразу оговориться, что подразумевается не высокоточное геодезическое картографирование, а оперативное получение трехмерной карты на движущемся транспорте. Для решения этой задачи подобрали бесхозный лидар (трехмерный сканер) и соорудили конструкцию для установки на автомобиль. Надо было быстро и дешево отработать прототип софта для сбора информации. В стек навигации входила инерциалочка и GPS-приёмник. После нескольких заездов по Санкт-Петербургу основной проблемой оказалась точная склейка трехмерных сканов по данным навигации. Чтобы обойти этот момент, мы решили испробовать SLAM-алгоритм чтобы карта строилась только по лидарной съемке. В результате SLAM у нас получилась карта в локальной системе координат, относительно старта маршрута. Для заказчика требовалось выдать трехмерную карту с географической привязкой.
После каждой поездки сохранялся набор облаков точек и трек маршрута. На выходе мы должны получить объединенный pointcloud, где каждая точка будет в глобальной географической системе координат.
Для подготовки и привязки мы использовали open source редактор Cloud compare.
Объединение облаков точек
SLAM сохраняет данные в виде набора PCD-файлов, которые необходимо предварительно объединить. Далее буду описывать шаги в виде инструкции-памятки.
-
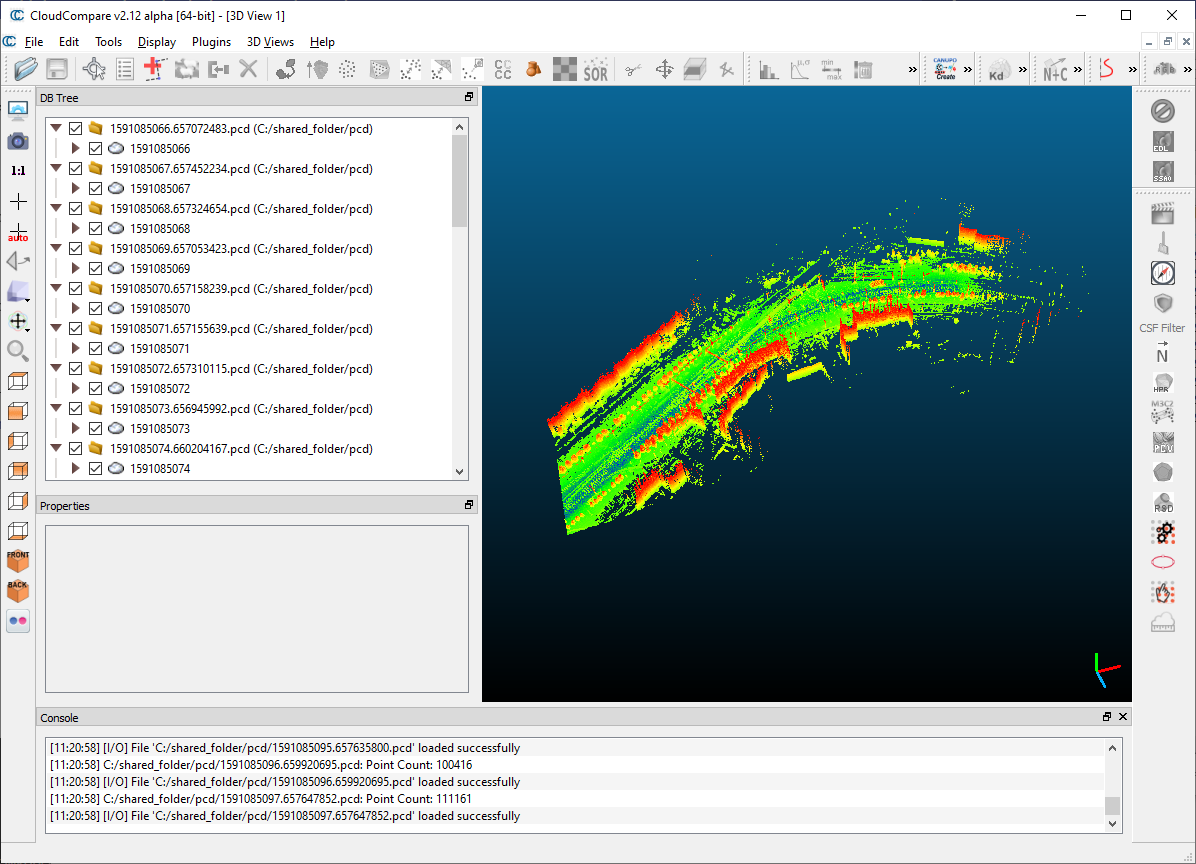
Нажимаем
File → Openи выбираем группу облаков для склейки. После подтверждения должно быть аналогично:
-
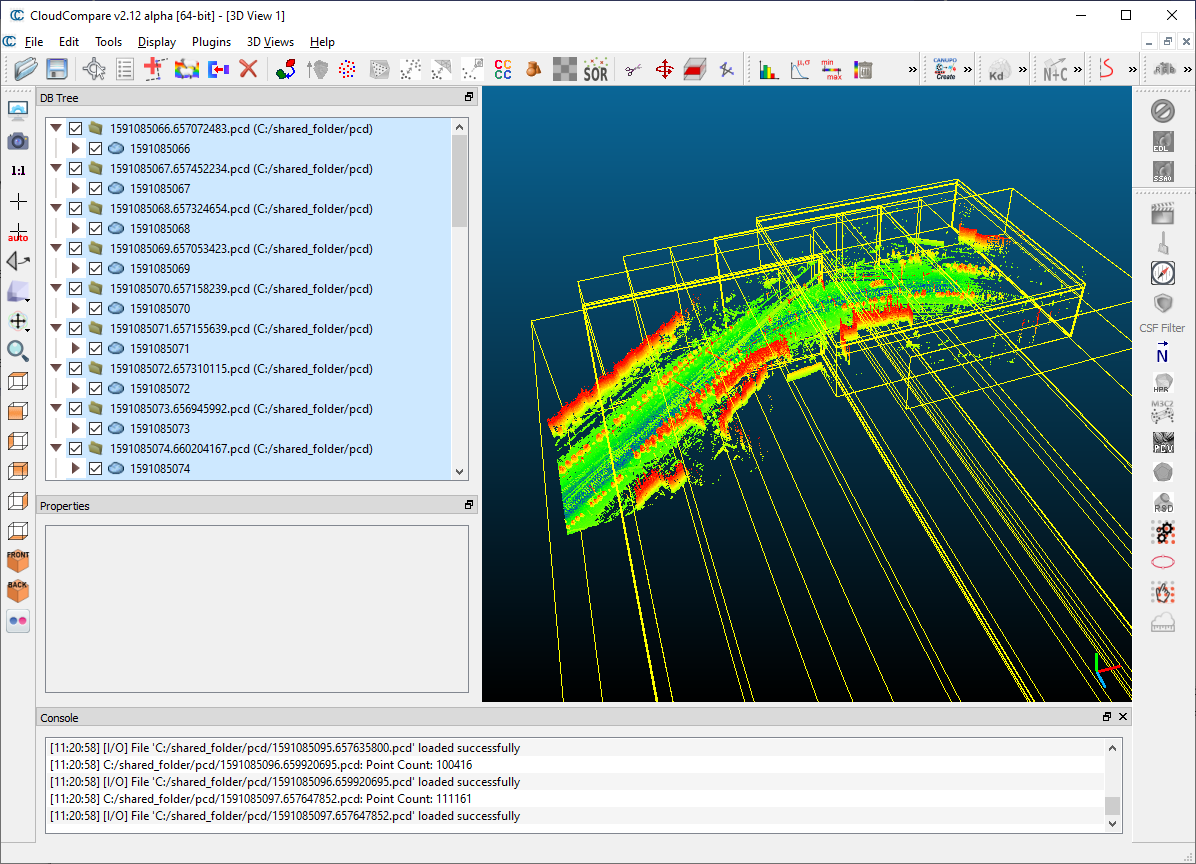
Выделяем с помощью Shift все облака для объединения.
-
Объединяем через
Edit → Merge. На вопрос типа «Generate scalar fields…» отвечаем No. Получилось объединенное облако.
-
Нажимаем
File → Saveи выбираем удобный формат для сохранения.

Обрезка облака
При объединении попался неудачно отсканированный участок, давайте обрежем его.
-
Нажимаем
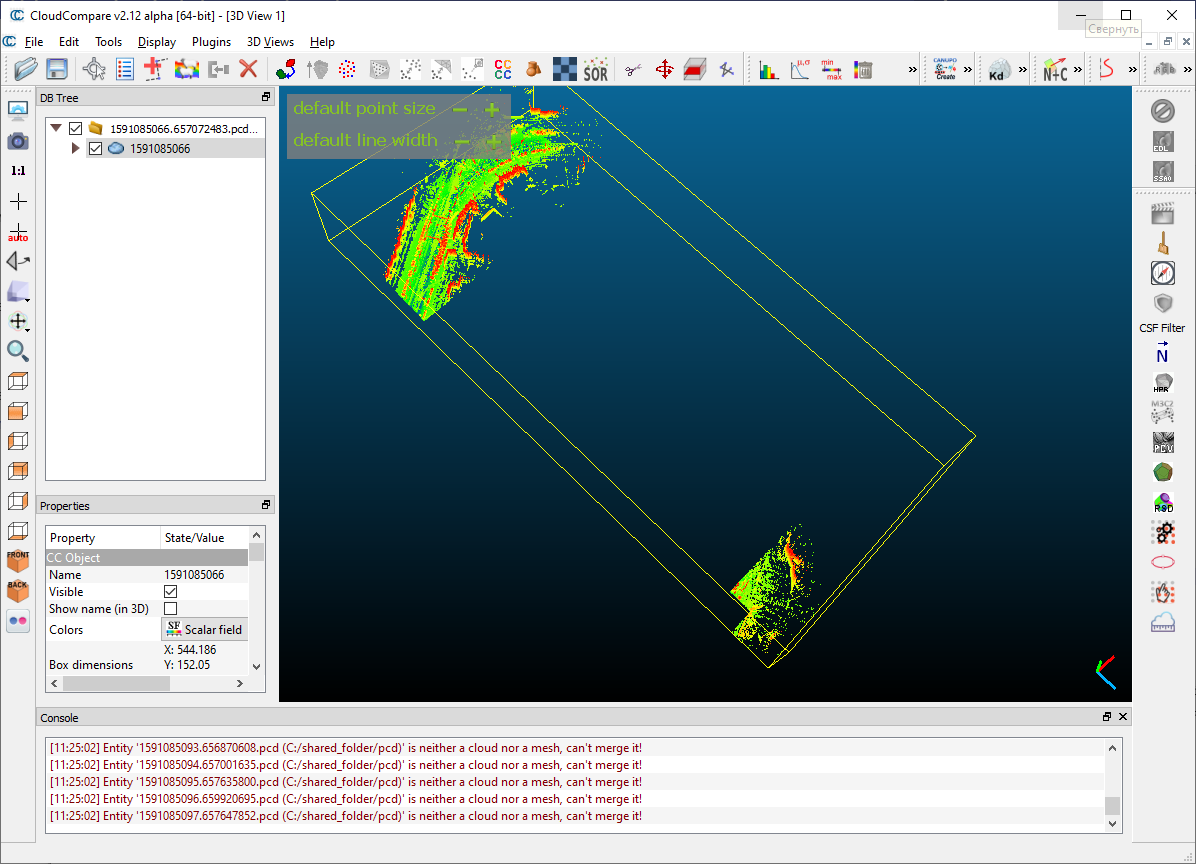
File → Openи выбираем облако для обрезки. Либо работаете с открытым далее. Допустим, оно у вас как в примере и вы хотите убрать лишнюю нижнюю часть:
-
Выбираем инструмент
Edit → Segment. Сверху справа появляется дополнительная панель и сверху по центру надпись текущего режима: Segmentation [ON]. Значит мышь теперь работает в режиме выделения контура для обрезки. Выделяем контур однократным нажатием ЛКМ, после окончания ПКМ. Должен получиться шатёр такого вида:
-
Если всё устроило, то нажимаем белый многоугольник на красном фоне с подсказкой Segment Out во временной панельке сверху.
-
Выделенная зона пропадает из видимости, надпись текущего режима: Segmentation [PAUSED]. Теперь надо нажать зеленую галочку на той же панели для применения удаления. После этой процедуры создаются два облака — одно с постфиксом .remained, другое с .segmented. Нажимая галочки в правой панели с названиями облаков можно отключить их видимость и посмотреть результат.
-
Нажимаем
File → Saveдля инвестирующего облака и выбираем удобный формат для сохранения.


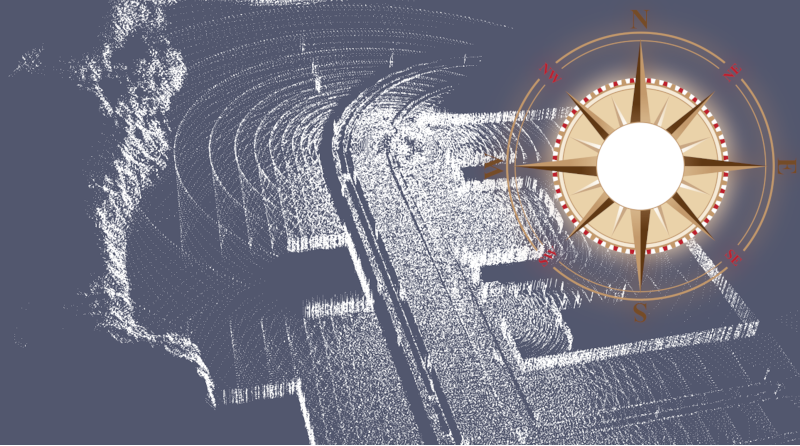
Процедура геопривязки
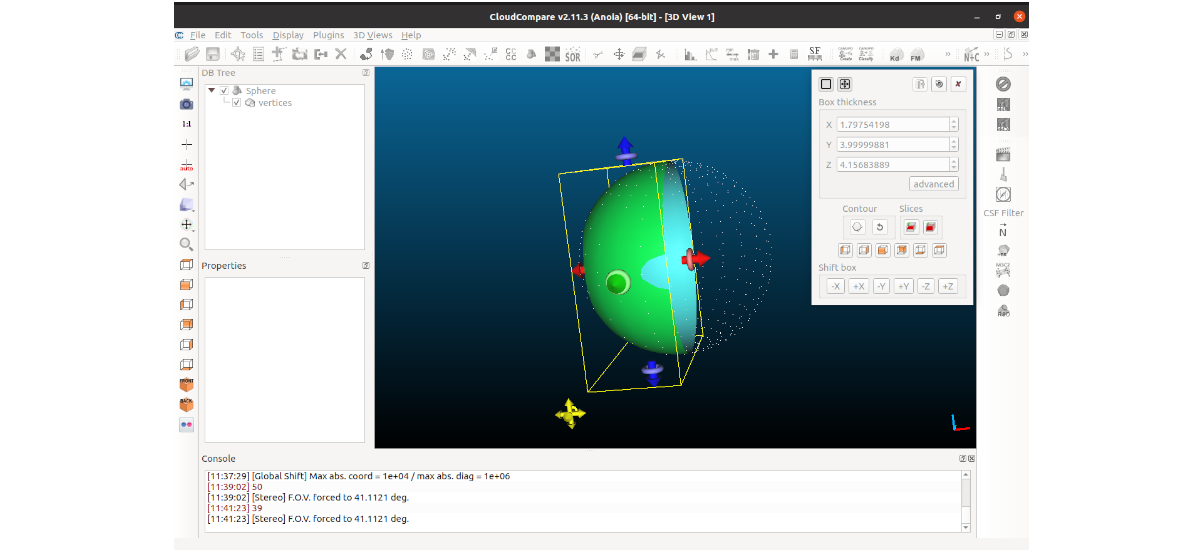
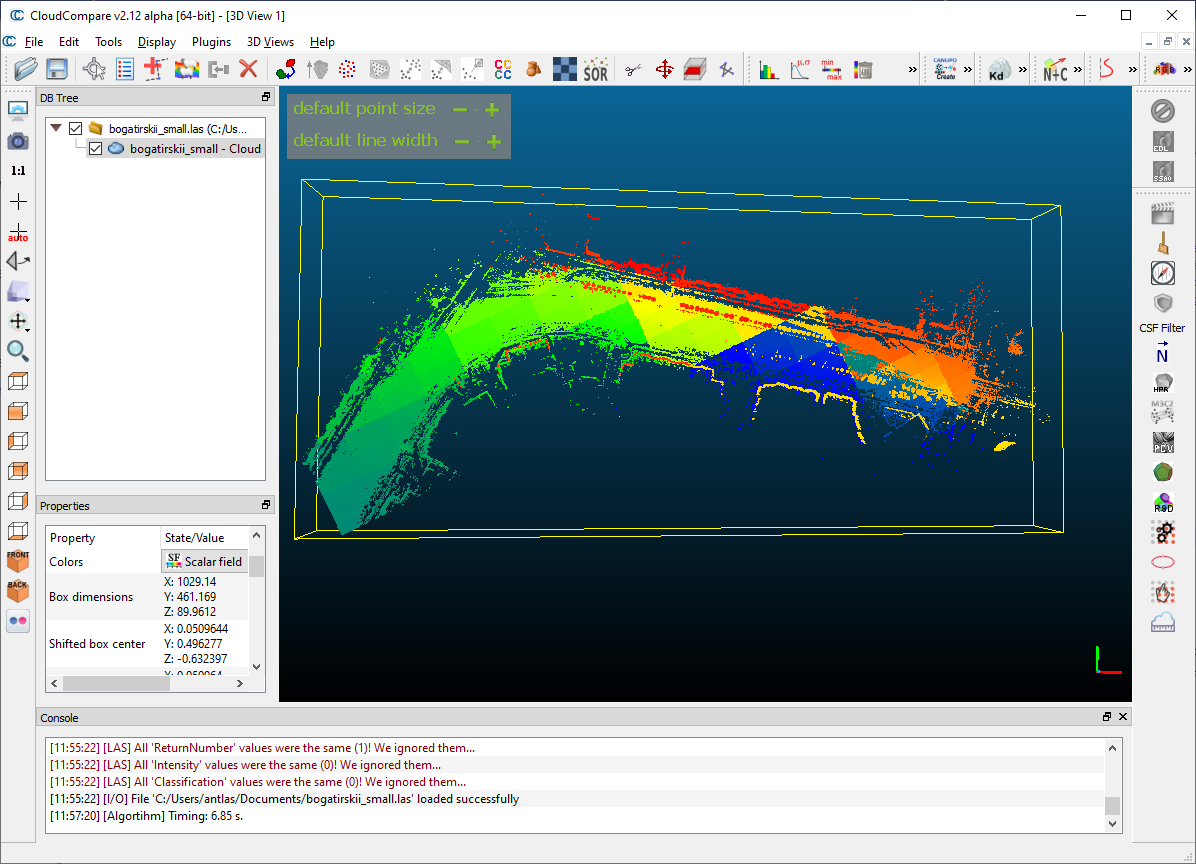
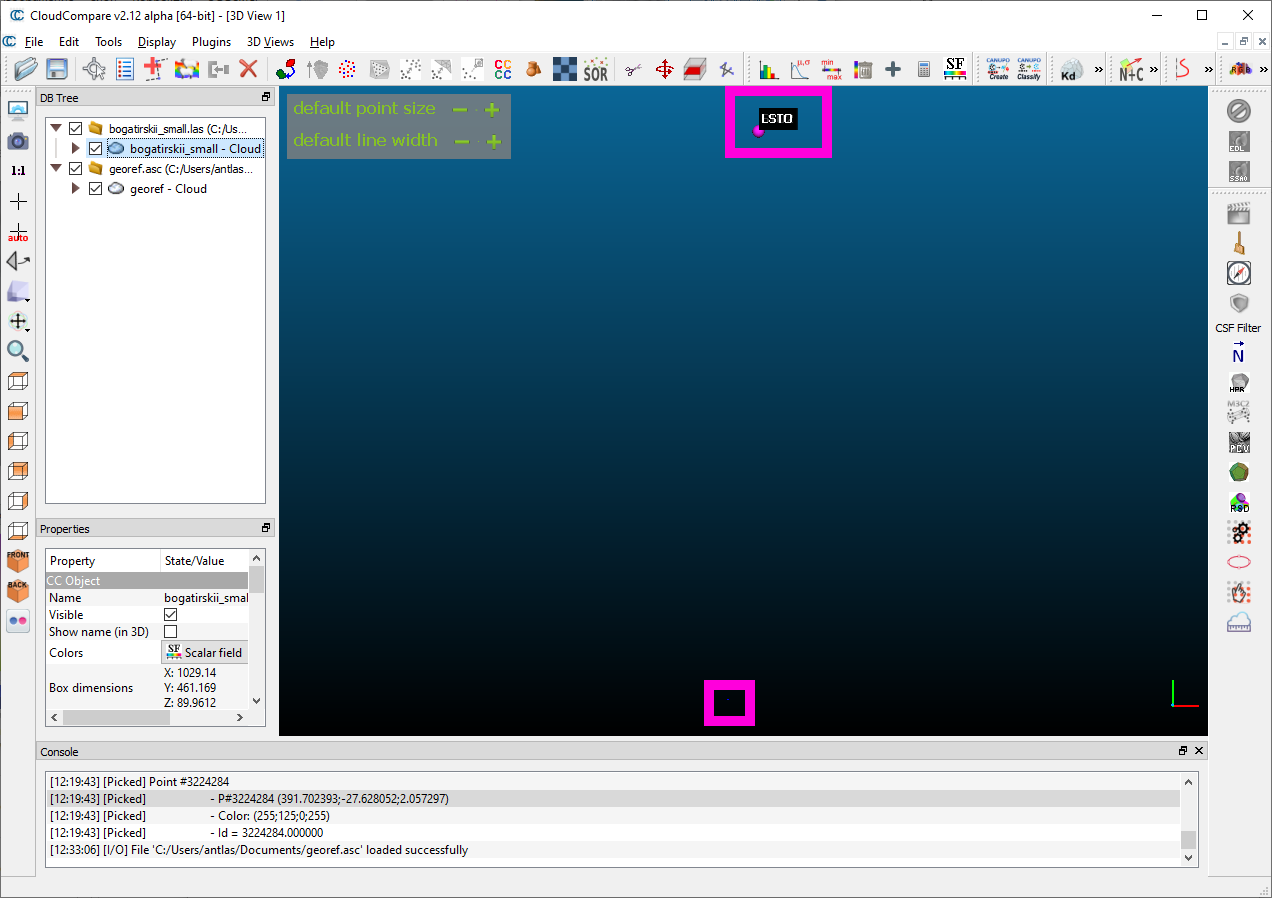
Геопривязка подразумевает преобразование координат облака из локальной системы к глобальной. Этот раздел сделан на основе видео. Общая идея следующая — чтобы произвести переход от одной системы координат к другой, необходимо получить матрицу трансформации 4×4, которая бы однозначно перевела бы все точки облака. Для получения такой матрицы надо построить связь между тремя точками облака и тремя точками на карте. Для примера взят файл облака с Богатырским проспектом:
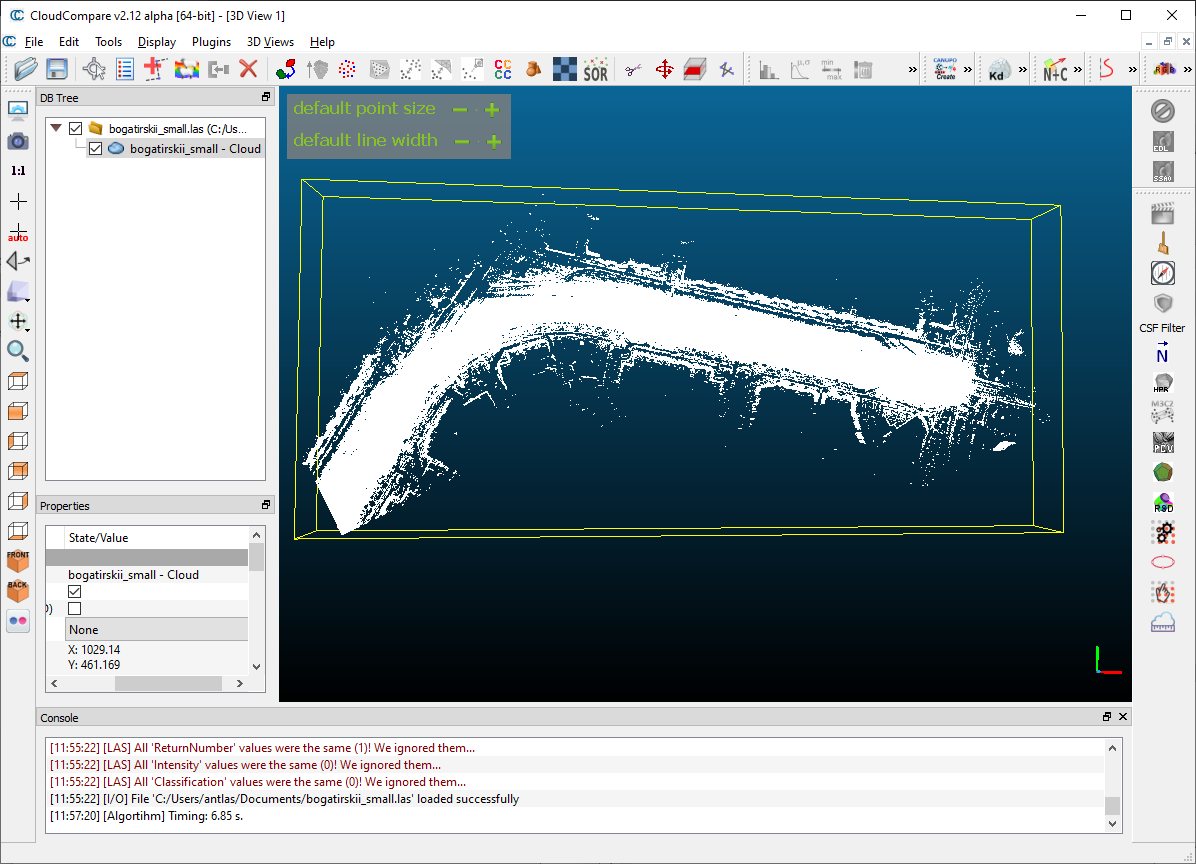
Если посмотрите на параметры слева снизу, то размер коробки с моделью будет:
X: 1029.14
Y: 461.169
Z: 89.9612Для более удобной работы немного раскрасим модель, для этого выбираем пункт Edit → Scalar fields → Add point indexes as SF:
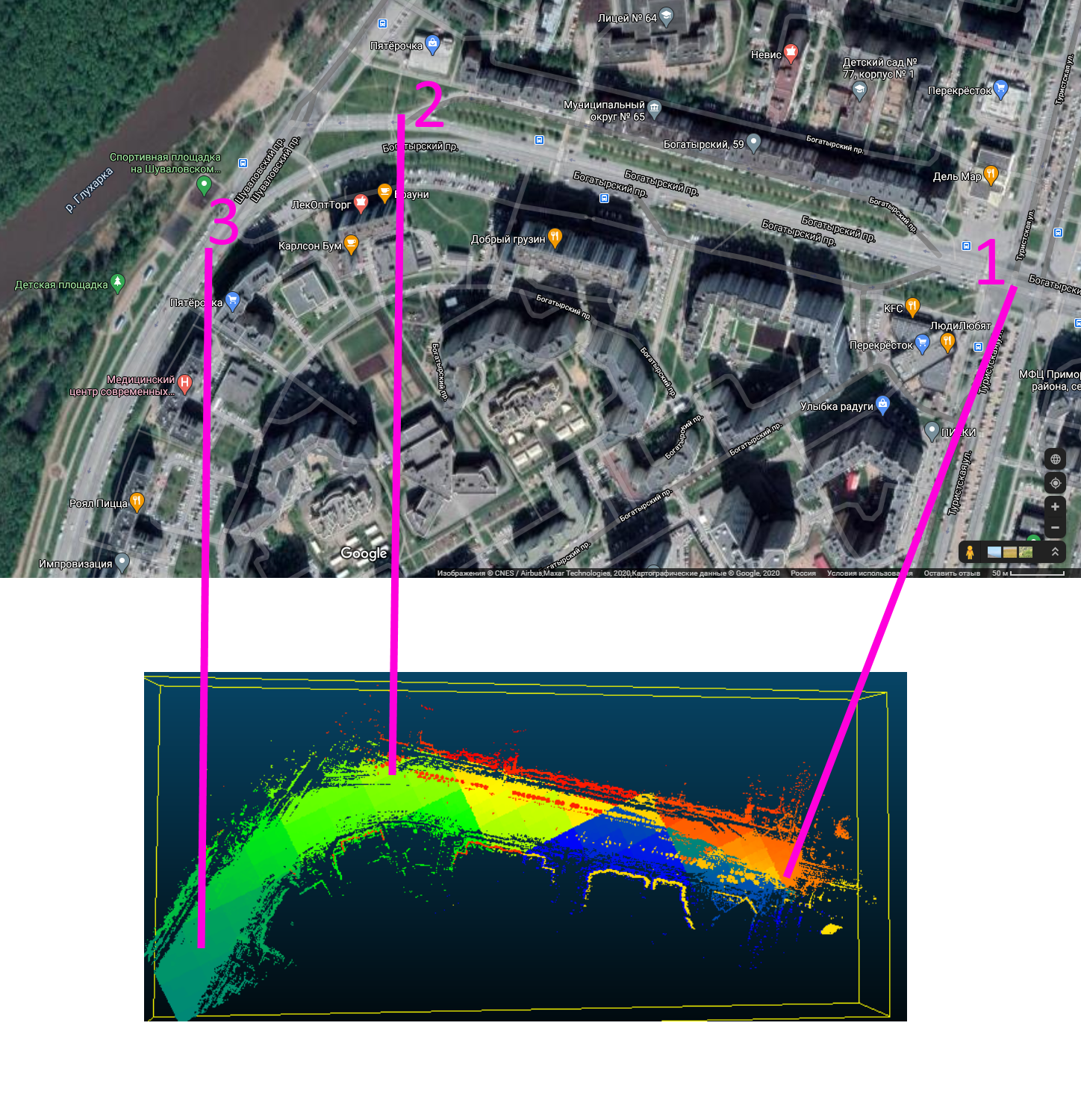
Далее нам необходимо обнаружить этот же участок на карте, можно пользоваться картами google, чтобы получить координаты для любой точки по нажатию.
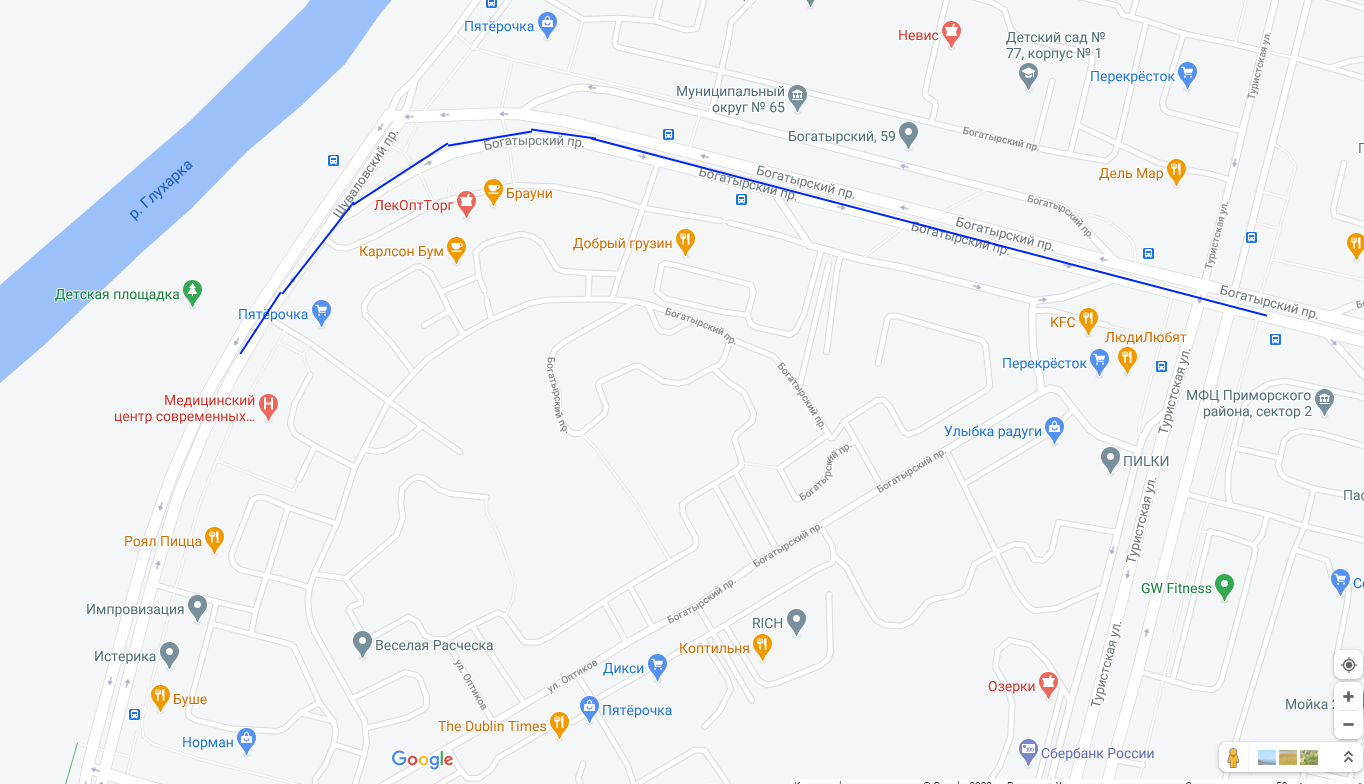
Теперь осталось определить такие точки, которые легко обнаруживаются на карте и легко найти в облаке. После анализа были выбраны такие точки:
-
Перекресток Богатырского и Туристской
-
Точка между двумя «рамками», где второй съезд с Богатырского
-
Точка под «рамкой» на Шуваловском проспекте
Теперь нужно получить координаты для этих точек. Для карты это широта, долгота, для облака это XYZ. Для получения координат точек в CloudCompare выбираем Tools → Point picking. Покажем на примере перекрестка:
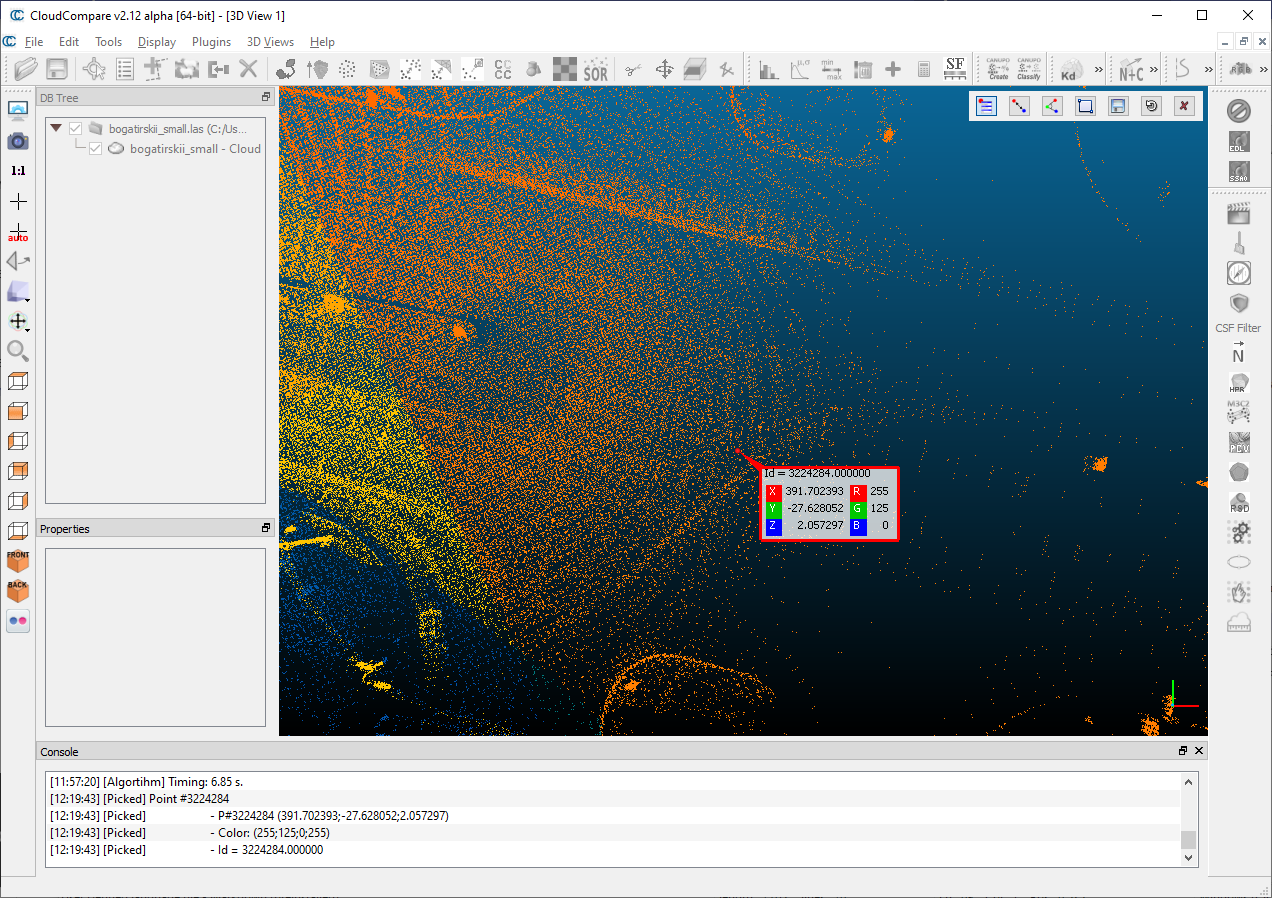
Координаты точки: (391.702393;-27.628052;2.057297)
Теперь то же самое на картах, просто кликаем мышью:

Координаты точки: (60.006764,30.212293)
Для удобства представления и конвертации выбрали проекцию Меркатора (UTM). Можно воспользоваться бесплатным сервисом latlong.net. Аналогично с остальными двумя местами. У вас должна получиться табличка такого типа (значения немного уточнены):
|
long |
lat |
UTM e |
UTM n |
XYZ cloud (octree) |
|
|---|---|---|---|---|---|
|
1. Пересечение богатырского и туристской |
30.212343 |
60.006768 |
344573.39 |
6655440.61 |
(376.377075;-20.382690;-0.272736) |
|
2. Между двух столбов на закруглении |
30.201111 |
60.008157 |
343953.94 |
6655621.66 |
(-235.253906;98.682617;-1.751526) |
|
3. Под вторым столбом, где шуваловский |
30.197818 |
60.006714 |
343763.61 |
6655468.82 |
(-410.510803;-71.153931;-1.030060) |
Теперь надо сделать маленькую модельку с координатами UTM, для этого создаёте текстовый файл. Для примера georef.asc с содержимым:
CENT,344573.39,6655440.61,0.0,255,0,0
STO2,343953.94,6655621.66,0.0,0,255,0
LSTO,343763.61,6655468.82,0.0,0,0,255Первая колонка — название точки, затем координаты (z=0), компоненты цвета r,g,b для удобства. Загружаем файл в CloudCompare, в окне выбираем Apply, затем на вопрос Rescale отвечаем No, иначе координаты все потеряются. После загрузки облака сильно разнесены друг от друга.
Теперь начнем совмещение. Выбираем оба облака. Затем Tools → Registration → Alighn(points pairs picking) В появившемся окне выбираем перемещаемое облако (bogatirskii_small). Появляется сверху справа табличка, в которой в верхней половине вводим координаты модели, а в нижней координаты UTM опорных точек. Надо внимательно переносить чтобы последовательность точек была одинаковая.

В правой колонке указана величина ошибки, в нашем случае максимальная ошибка 14 метров при совмещении. Можно поискать другие опорные точки, но для примера подойдет. Нажимаем align, рассчитывается матрица и выполняется трансформация.

На скриншоте видно как совместились точки. Если всё устраивает, то нажимаем зеленую галочку. В окне отобразится трансформационная матрица и средняя ошибка (10.446). Всё, теперь готово, проверяем смещение координат. Нажимаем на bogatirskii_small слева и смотрим Global Box Center:
X: 344176.843750
Y: 6655525.500000
Z: -0.003010Далее сохраняем в удобном формате. Мы выбрали LAS, так как он является определенным стандартом для работы с pointcloud. Однако, для корректного перехода в LAS предлагаю сохранение в формате Ascii Cloud с префиксом .xyz (bogatirskii_georef.xyz). Тогда начало файла будет вида:
344050.87500000 6655427.50000000 -2.37526727
344050.96875000 6655427.50000000 -2.09358692
344050.90625000 6655427.50000000 -1.77294660
344063.78125000 6655432.00000000 14.17946529
344083.50000000 6655438.00000000 -2.25361919
344083.53125000 6655438.50000000 -2.18411636
344069.46875000 6655448.50000000 -4.81668091
344073.34375000 6655450.00000000 -4.93998623
344142.00000000 6655462.50000000 -1.68570638
344427.09375000 6655324.00000000 0.06759101
344479.12500000 6655306.50000000 -2.23689747Теперь можно через lastools сконвертировать в LAS с указанием зоны:
>txt2las -i bogatirskii_georef.xyz -o bogat_geo.las -parse xyz -utm 36VКак не потерять точность
При трансформации система может выдать сообщение следующего вида:
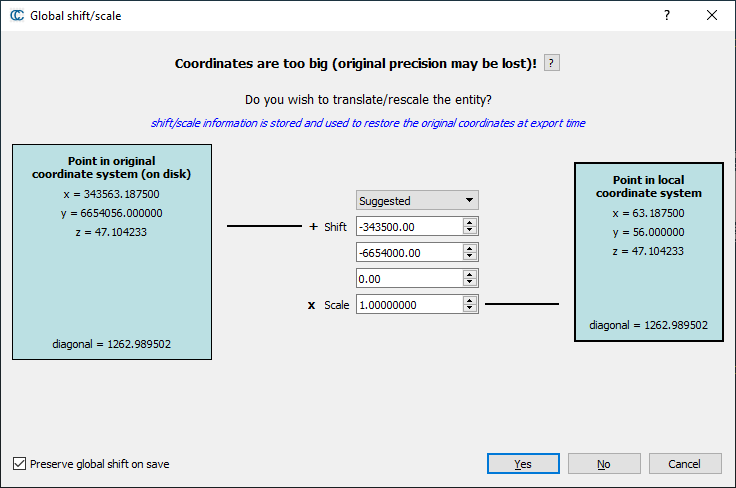
Это значит что при применении трансформации, будет потеряна точность в координатах и часть точек сольется, получится сетчатая структура (это ограничения самого CloudCompare). Чтобы этого не произошло, предлагается использовать отрицательный сдвиг начала координат, а при сохранении его учесть. Нажимаем YES. Получаются результаты такого вида:
Shifted box center:
X: 60.3544
Y: 31.0959
Z: 72.9026
Global box center:
X: 343560.354370
Y: 6654031.095917
Z: 72.902580Всё нормально. Теперь можно сохранить, например в LAS/LAZ. Чтобы добавить информацию по проекции надо воспользоваться утилитой las2las из комплекта LasTools:
las2las -i my_file.laz -o my_file_utm.laz -utm 36VФайл геопривязан и есть сведения о проекции.
Проверка расположения в GoogleEarth
Можно приблизительно оценить регион геопривязки. Получаем shape-файл из LAS:
las2shp.exe bogat_fp2_geo.lazВ каталоге сгенерируется файл bogat_fp2_geo.shp. Теперь открываем его GoogleEarth. Если он очень большой можно загрузить часть. Выделяем галочкой и смотрим на маячки.

Выводы
В результате получилось геопривязанное облако, приемлемого качества. Во всяком случае, заказчику понравилось. Конечно, минус такого подхода — использование разных, не совсем удобных утилит. Конечно, хотелось бы работать в одной мощной среде. Основное преимущество — не надо платить за дорогое коммерческое решение для редких задач привязки облаков.
Ссылки
-
Cloud compare
-
LasTools
-
Сервис latlong.net
-
Видео с инструкцией по геопривязке CloudCompare
CloudCompare – это бесплатное программное обеспечение с открытым исходным кодом, предназначенное для обработки и анализа 3D-облаков точек. Оно широко используется в различных областях, таких как геодезия, архитектура, и даже в научных исследованиях. С помощью CloudCompare пользователи могут визуализировать, обрабатывать и анализировать данные, полученные с помощью лазерного сканирования и фотограмметрии.
Одной из ключевых возможностей CloudCompare является импорт данных из различных форматов, включая LAS/LAZ, PLY, OBJ и другие. Программа позволяет не только просматривать облака точек, но и выполнять их очистку, выравнивание, а также проводить сложный анализ, например, сравнение различных облаков точек для выявления изменений.
Пользователи могут воспользоваться такими инструментами, как создание сеток и моделей, экстракция поверхностей и линий, а также фильтрация и сегментация данных. CloudCompare также поддерживает различные виды визуализации, позволяя пользователям настроить отображение данных в зависимости от своих потребностей и предпочтений.
Некоторые полезные функции включают возможность работы с большими объемами данных, поддержку многопоточности для ускорения обработки и развитую систему плагинов, которая позволяет добавлять новые функции и расширения для улучшения функционала. В результате CloudCompare становится универсальным инструментом для профессионалов, занимающихся анализом 3D-данных.
Руководство пользователя CloudCompare на русском языке
В данном руководстве мы рассмотрим основные команды и инструменты, доступные в CloudCompare, а также предоставим советы по эффективному использованию программы для анализа точечно-облачных данных.
Основные функции CloudCompare
- Импорт и экспорт данных: Поддерживает различные форматы файлов, включая LAS, XYZ, PLY и другие.
- Визуализация: Позволяет просматривать облака точек в 3D и использовать различные режимы отображения.
- Обработка данных: Включает инструменты для фильтрации, сегментации и регистрации облаков точек.
- Анализ: Возможность проводить измерения и анализировать данные для выявления различных характеристик.
Установка CloudCompare
- Скачайте последнюю версию CloudCompare с официального сайта.
- Запустите установочный файл и следуйте инструкциям установщика.
- После завершения установки откройте программу и проверьте работоспособность.
Основные команды и инструменты
| Команда | Описание |
|---|---|
| Загрузить облако точек | Импорт данных из файла. |
| Регистрация облаков | Совмещение двух и более облаков точек. |
| Фильтрация | Удаление лишних точек для улучшения качества анализа. |
| Измерения | Проведение измерений расстояний, площадей и объемов. |
CloudCompare: Руководство пользователя на русском
В этом руководстве мы рассмотрим основные функции CloudCompare, а также дадим советы по работе с программой, чтобы помочь вам максимально эффективно использовать ее возможности.
Установка CloudCompare
- Перейдите на официальный сайт CloudCompare.
- Выберите версию программы, соответствующую вашей операционной системе (Windows, Mac, Linux).
- Скачайте установочный файл.
- Запустите установочный файл и следуйте инструкциям на экране.
Основные функции
- Визуализация облаков точек: Просмотр и анализ трехмерных данных.
- Регистрация облаков: Совмещение нескольких облаков точек для создания единой модели.
- Фильтрация: Удаление шума и выделение интересующих объектов.
- Измерения: Проведение различных измерений между точками, плоскостями и объемами.
Работа с облаками точек
Для загрузки облака точек в CloudCompare выполните следующие действия:
- Откройте программу.
- Выберите “File” в верхнем меню.
- Нажмите “Open” и выберите файл с облаком точек.
После загрузки облака вы можете использовать различные инструменты для анализа и редактирования данных.
Полезные советы
- Регулярно сохраняйте свою работу, чтобы избежать потери данных.
- Изучите документацию по каждой функции для лучшего понимания возможностей программы.
- Экспериментируйте с различными инструментами, чтобы найти наиболее подходящие для ваших задач.
Заключение
CloudCompare — мощный инструмент для работы с трехмерными данными. С его помощью вы можете выполнять широкий спектр задач, от простого просмотра облаков точек до сложной обработки и анализа данных. Следуйте этому руководству, чтобы начать работу и максимально использовать возможности программы.
Руководство по CloudCompare
В данном руководстве представлены основные функции и особенности CloudCompare, а также краткие инструкции по работе с программой.
Основные функции
- Импорт и экспорт различных форматов файлов (LAS, LAZ, OBJ и др.).
- Обработка облаков точек (очистка, фильтрация, слияние и т.д.).
- Проведение сложного анализа (сравнение облаков точек, вычисление расстояний и статистики).
- Создание и редактирование 3D-моделей.
- Визуализация данных с помощью различных инструментов.
Установка
- Скачайте последнюю версию CloudCompare с официального сайта.
- Запустите установочный файл и следуйте инструкциям на экране.
- После завершения установки откройте программу.
Работа с облаками точек
Для импорта облака точек выполните следующие шаги:
- В меню выберите «Файл» > «Импорт».
- Выберите файл с облаком точек и нажмите «Открыть».
Чтобы удалить шум или лишние точки, используйте инструменты фильтрации. Для этого:
- Выделите облако точек.
- Перейдите в меню «Редактировать» > «Фильтры» > «Преобразование».
- Настройте параметры фильтрации и нажмите «Применить».
Примеры использования
| Функция | Описание |
|---|---|
| Сравнение облаков | Позволяет найти различия между двумя облаками точек. |
| Сегментация | Выделяет интересующие области в облаке точек. |
| Сохранение результатов | Экспортирует обработанные данные в различные форматы. |
CloudCompare — это универсальный инструмент для работы с 3D-данными, который предоставляет пользователям множество возможностей для анализа и визуализации облаков точек.
Руководство пользователя CloudCompare
В данном руководстве мы рассмотрим основные функции CloudCompare, а также пошаговые инструкции по работе с программой.
Основные функции CloudCompare
- Импорт и экспорт разнообразных форматов файлов
- Процесс регистрации, включая ICP (Iterative Closest Point)
- Сравнение облаков точек по различным критериям
- Инструменты для фильтрации и подготовки данных
- Подсчет объемов и площадей
Шаги для работы с CloudCompare
- Установка: Загрузите последнюю версию CloudCompare с официального сайта и следуйте инструкциям по установке.
- Импорт данных: Откройте программу и используйте функцию «Файл» -> «Импорт», чтобы загрузить ваше точечное облако.
- Обработка данных: Используйте доступные инструменты для фильтрации, сегментации и регистраций облаков.
- Анализ: Выполните необходимый анализ данных с помощью инструментов сравнения и измерения.
- Экспорт результатов: Сохраните обработанные данные в нужный формат, выбрав «Файл» -> «Экспорт».
TIP
Регулярно сохраняйте свою работу, чтобы избежать потери данных при неожиданном завершении программы.
Дополнительные ресурсы
| Ресурс | Ссылка |
|---|---|
| Официальный сайт CloudCompare | cloudcompare.org |
| Форум поддержки | forum.cloudcompare.org |
| Документация | wiki |
Руководство по CloudCompare
В этом руководстве мы рассмотрим основные функции и возможности CloudCompare, а также основные шаги для начала работы. Программа предлагает интуитивно понятный интерфейс, позволяя пользователям выполнять сложные задачи с минимальными усилиями.
Основные функции CloudCompare
- Импорт и экспорт различных форматов данных.
- Обработка облаков точек, включая фильтрацию и сегментацию.
- Регистрация облаков точек для объединения данных из разных источников.
- Визуализация и анализ 3D-моделей.
- Поддержка работы с растрами и сетками.
Системные требования
| Компонент | Минимальные требования |
|---|---|
| Операционная система | Windows 7 или выше, macOS, Linux |
| Оперативная память | 4 ГБ |
| Процессор | 2 ГГц и выше |
| Графическая карта | Поддержка OpenGL 2.1 и выше |
Начало работы
- Скачайте последнюю версию CloudCompare с официального сайта.
- Установите программу, следуя инструкциям на экране.
- Запустите CloudCompare и откройте файл с облаком точек.
- Используйте инструменты для анализа и обработки данных.
Руководство пользователя CloudCompare
В данном руководстве рассматриваются основные инструменты и настройки CloudCompare, которые помогут вам эффективно работать с облаками точек и выполнять различные задачи по их обработке.
Основные функции CloudCompare
- Импорт и экспорт облаков точек в различных форматах.
- Редактирование облаков точек: удаление, фильтрация, редуцирование.
- Визуализация 3D данных и создание профилей.
- Сравнение облаков точек и создание моделей.
- Анализ расстояний между точками.
Начало работы
- Скачайте и установите CloudCompare с официального сайта.
- Запустите программу.
- Импортируйте ваше облако точек через меню File → Open.
- Ознакомьтесь с интерфейсом: панель инструментов, окно 3D-визуализации и панель свойств.
- Начните обрабатывать данные с помощью инструментов в панели инструментов.
Системные требования
| Операционная система | Процессор | Оперативная память | Диск |
|---|---|---|---|
| Windows 7 и выше, macOS, Linux | Современный процессор с поддержкой 64-бит | Не менее 4 ГБ | 50 МБ свободного места |
Руководство пользователя CloudCompare
Это руководство поможет вам освоить необходимые инструменты для работы с облаками точек, включая импорт данных, визуализацию, обработку и экспорт. Рассмотрим основные возможности и команды, которые доступны в CloudCompare.
Основные функции CloudCompare
- Импорт облаков точек: Вы можете импортировать данные из различных форматов, включая LAS, PLY и OBJ.
- Визуализация: Программа предлагает богатые возможности для визуализации облаков точек с помощью различных режимов отображения.
- Обработка данных: CloudCompare поддерживает множество методов обработки, включая фильтрацию, выделение и выравнивание облаков точек.
- Анализ и сравнение: Вы можете сравнивать различные облака точек для выявления изменений или ошибок.
- Экспорт: CloudCompare позволяет экспортировать обработанные данные в разные форматы.
Шаги для начала работы
- Скачайте и установите CloudCompare с официального сайта.
- Запустите программу и выберите опцию импорта для загрузки облака точек.
- Используйте инструменты визуализации для настройки отображения данных.
- Применяйте необходимые методы обработки для анализа ваших данных.
- Экспортируйте результаты в нужном вам формате.
Часто используемые команды
| Команда | Описание |
|---|---|
| File > Open | Открывает облако точек из файла. |
| Edit > Filter | Применяет выбранный фильтр к облаку точек. |
| Tools > Align | Выравнивает два облака точек. |
| File > Export | Экспортирует данные в указанный формат. |
В следующей статье мы рассмотрим CloudCompare. Это программное обеспечение для обработки трехмерных облаков точек и треугольной сетки. Цель этого приложения — провести сравнение двух плотных трехмерных облаков точек, например, полученных с помощью лазерного сканера. Кроме того, он также предназначен для сравнения облака точек и треугольной сетки. CloudCompare и ccViewer в настоящее время работают в системах Gnu / Linux, Windows и macOS. Программа выпущена под лицензией GNU General Public License (GPL), поэтому пользователь может использовать их для любых целей.
Благодаря обновлениям CloudCompare стал более универсальное программное обеспечение для обработки облаков точек, включая множество передовых алгоритмов как: rРегистрация, повторная выборка, манипуляции с цветным / нормальным / скалярным полем, статистические вычисления, управление датчиками, интерактивное или автоматическое нацеливание, улучшение визуализации. и еще кое-что.
Эта программа была первоначально создана в результате сотрудничества между Telecom ParisTech и отделом исследований и разработок EDF. Проект CloudCompare стартовал в 2003 году, когда Даниэль Жирардо-Монто получил докторскую степень по обнаружению изменений в трехмерных геометрических данных. В то время его основной целью было быстрое обнаружение изменений в трехмерных облаках точек высокой плотности, полученных с помощью лазерных сканеров на промышленных объектах или строительных площадках. Позже он превратился в более общее и продвинутое программное обеспечение для обработки 3D-данных. Теперь это автономный проект с открытым исходным кодом и бесплатное программное обеспечение.
Индекс
- 1 Общие функции CloudCompare
- 2 Установите CloudCompare в Ubuntu
- 2.1 деинсталляция
- CloudCompare предоставляет набор основных инструментов для ручного редактирования и рендеринга трехмерных облаков точек и треугольных сеток. Он также предлагает несколько расширенных алгоритмов обработки, включая методы для выполнения:
-
- Прогнозы (на основе раскручивающихся осей, цилиндров или конуса, …)
- Записывать (ICP, …)
- Расчет расстояния (cloud-cloud или cloud-mesh расстояние от ближайшего соседа, …)
- Статистический расчет (пространственный тест Хи-квадрат, …)
- Сегментация (маркировка подключенных компонентов, основанная на прямом распространении, …)
- Оценка геометрических характеристик (плотность, кривизна, шероховатость, ориентация геологической плоскости, …)
- CloudCompare может обрабатывать неограниченное количество скалярных полей для каждого облака точек, к которому могут применяться различные специализированные алгоритмы (сглаживание, оценка градиента, статистика и т. д.). Система динамического воспроизведения цвета помогает пользователю эффективно визуализировать скалярные поля для каждой точки.
- Пользователь сможет интерактивно сегментировать 3D-объекты (с 2D-полилинией, нарисованной на экране), интерактивно вращать / перемещать один или несколько объектов относительно других, интерактивно выбирать отдельные точки или пары точек (чтобы получить длину соответствующего сегмента) или точечные тройки (чтобы получить угол и плоскость, соответствующие нормальности). Последняя версия также поддерживает создание 2D-меток, прикрепленных к точкам или аннотациям прямоугольных областей.
- Механизм подключаемых модулей позволяет еще больше расширить возможности CloudCompare.
Установите CloudCompare в Ubuntu
Чтобы установить CloudCompare в Ubuntu, пользователи могут использовать пакет Flatpak, который можно найти в плоская ступица. Если вы используете Ubuntu 20.04 и в вашей системе по-прежнему не включена эта технология, вы можете продолжить гид что коллега написал в этом блоге некоторое время назад.
Когда вы сможете установить эти типы приложений на свой компьютер, вам нужно будет только открыть терминал (Ctrl + Alt + T) и запустить следующее команда установки:
flatpak install flathub org.cloudcompare.CloudCompare
После завершения установки вы можете запустить программу ищем соответствующий лаунчер на нашем компьютере, хотя команду можно записать и в терминале:
flatpak run org.cloudcompare.CloudCompare
деинсталляция
к удалить эту программу, необходимо только открыть терминал (Ctrl + Alt + T) и выполнить в нем следующую команду:
flatpak uninstall org.cloudcompare.CloudCompare
CloudCompare — бесплатное программное обеспечение (Хотя платить за программное обеспечение не обязательно, его разработчики приветствуют пожертвования от тех пользователей, которые считают его полезным.). По любым вопросам, сообщениям об ошибках или предложениям пользователи могут проверить форум проекта, его хранилище на Github или сайт проекта.
Содержание статьи соответствует нашим принципам редакционная этика. Чтобы сообщить об ошибке, нажмите здесь.