
Сборка основы для рамы
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
-
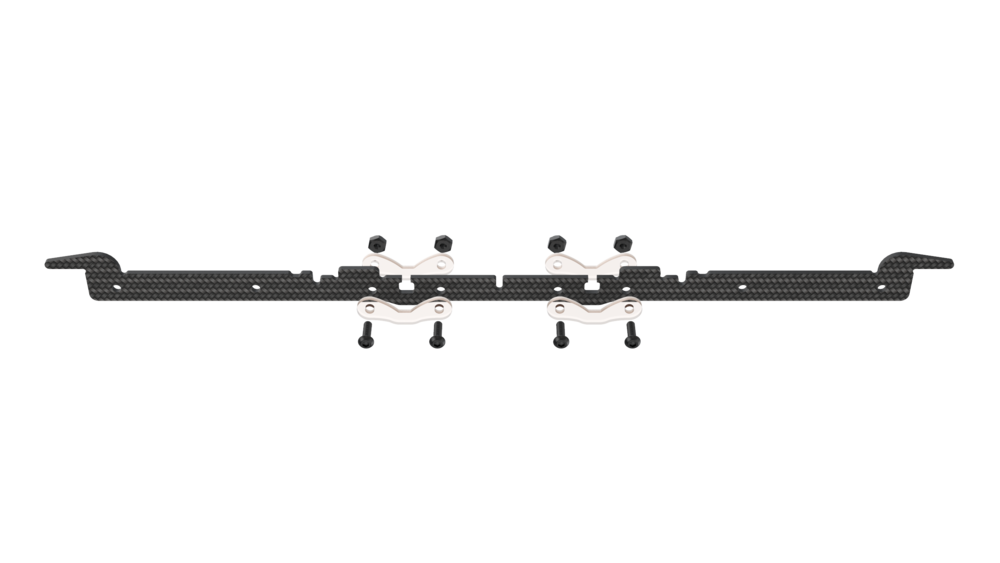
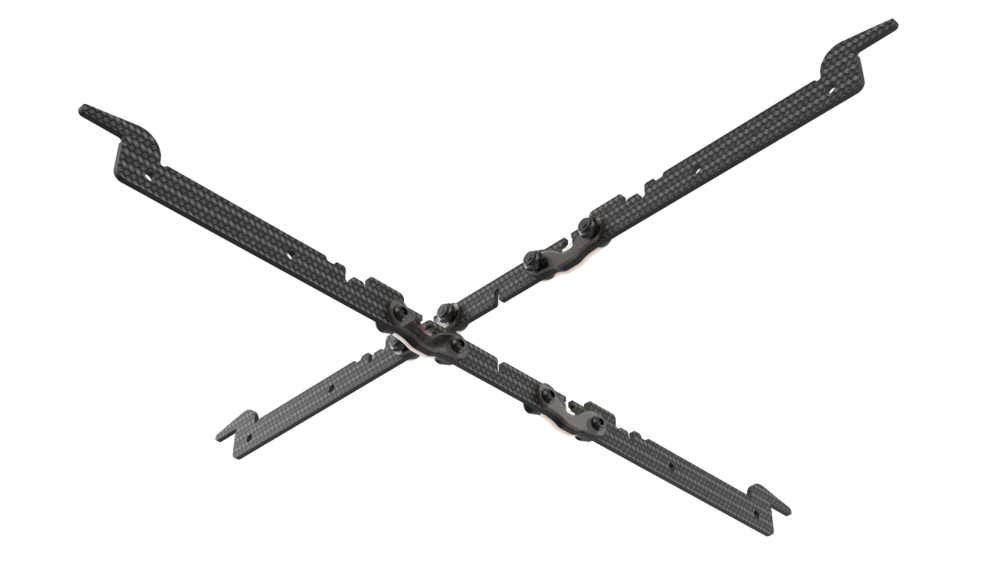
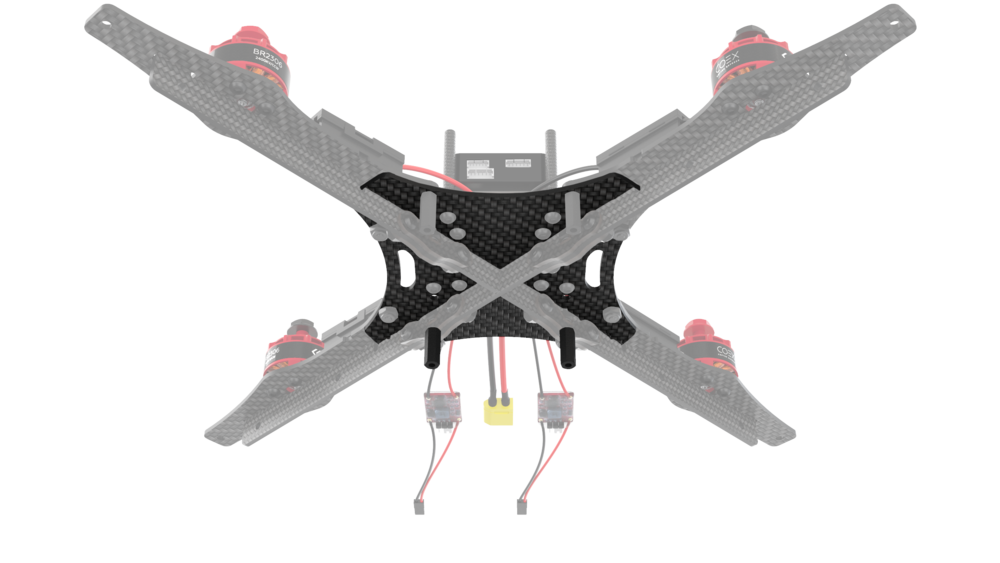
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов
- Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
-
Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
-
Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.
Повторите эти действия для остальных моторов.
Сборка рамы
-
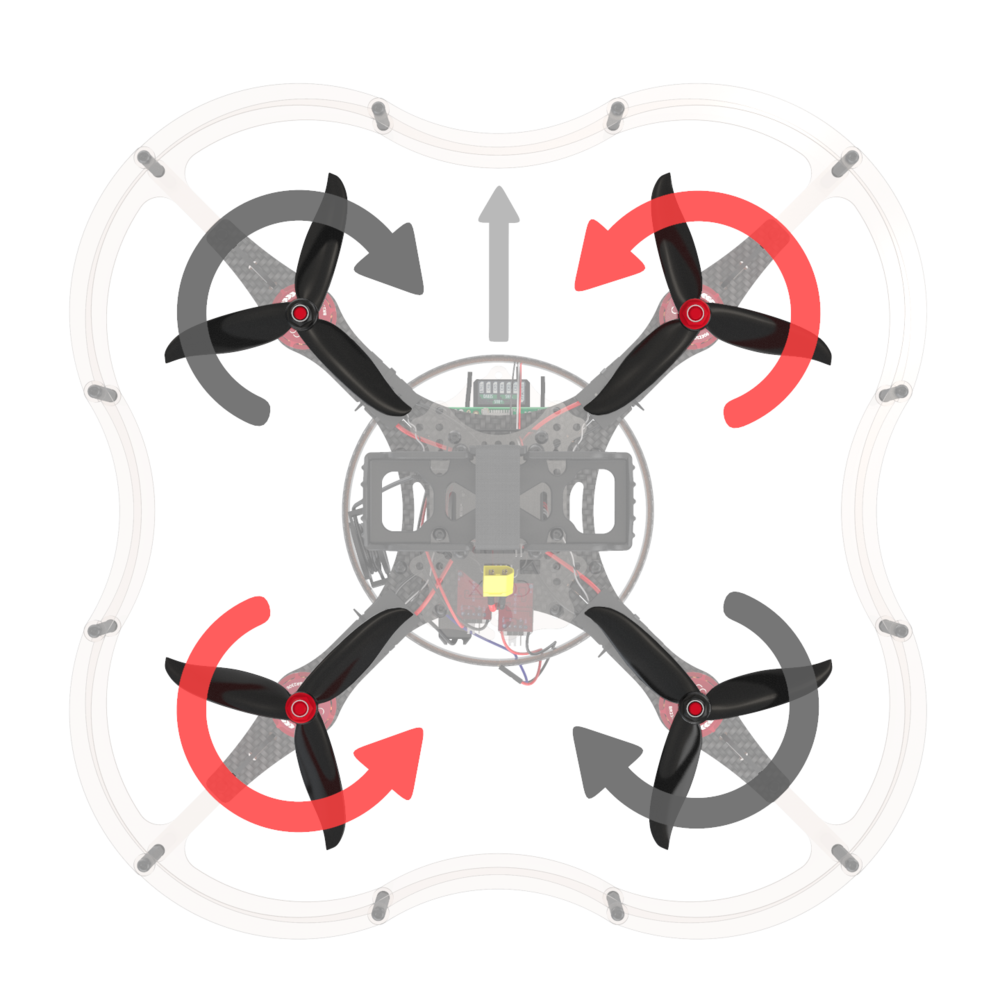
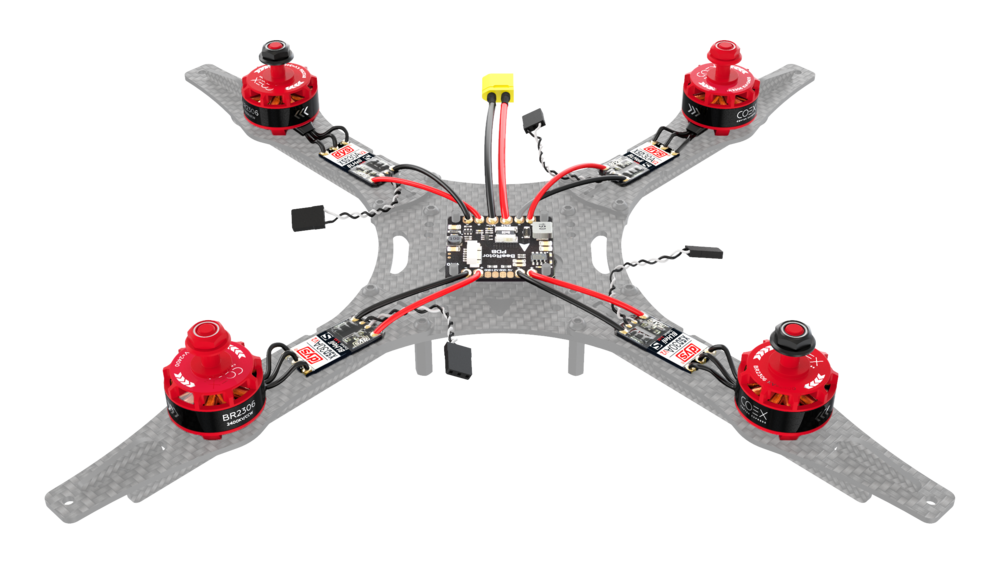
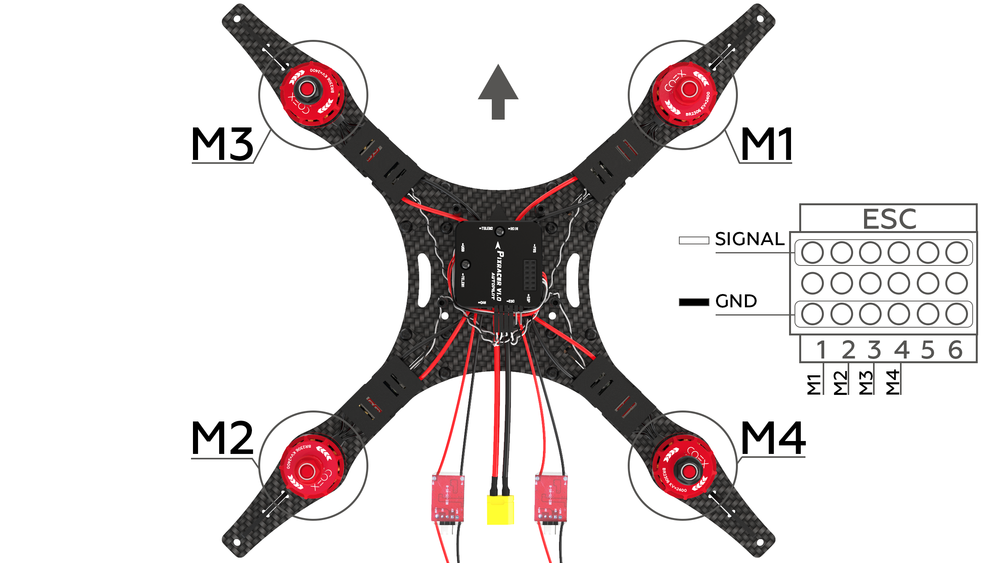
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.
Подготовка платы распределения питания
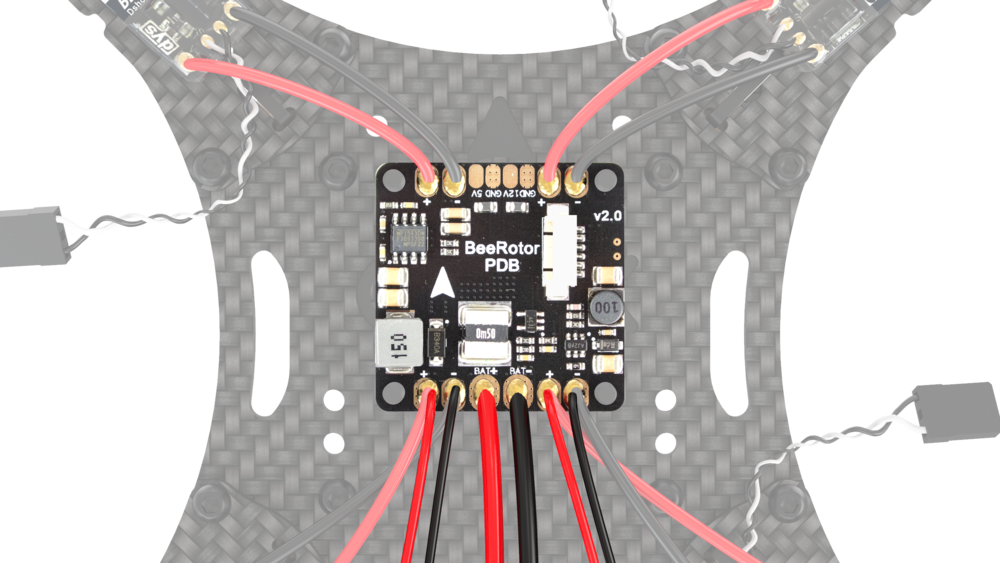
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Монтаж PDB
-
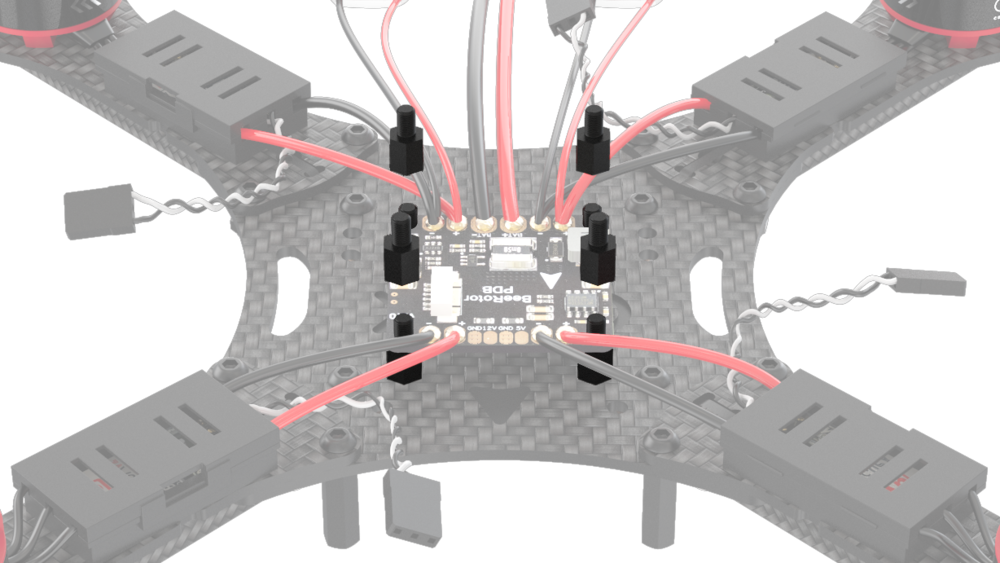
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
Установите PDB на стойки.
-
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.
Пайка регуляторов и ВЕС
- Припаяйте фазные провода моторов к регуляторам.
-
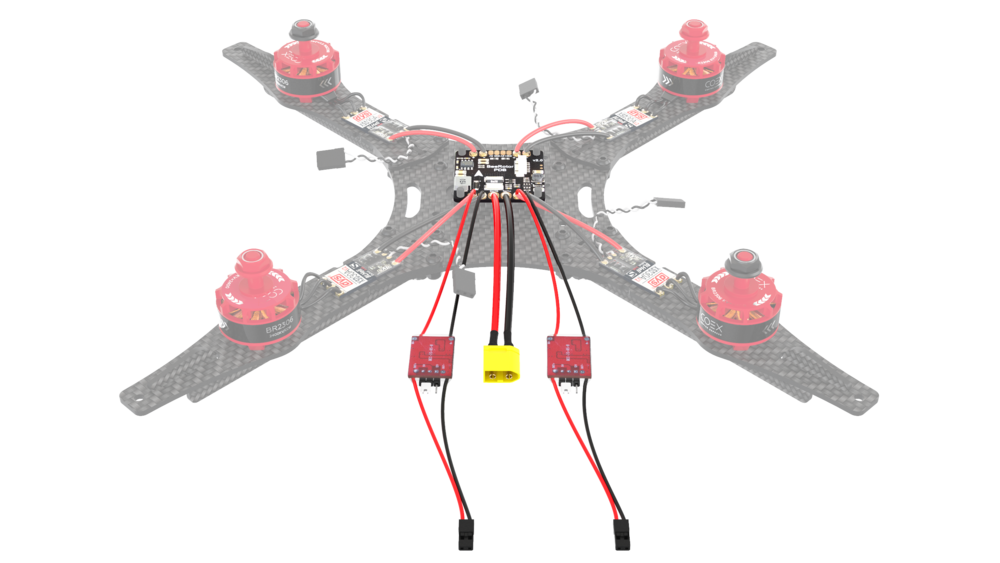
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Перевод пульта в режим PWM
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
-
Переключатели A, B, C, D в положение «от себя».

Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Сопряжение приёмника и пульта
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
-
Светодиод на радиоприемнике должен мигать.
-
Зажмите кнопку BIND KEY на пульте.
-
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
-
Ждите синхронизации.
- Отсоедините джампер.
- Светодиод на приемнике должен гореть непрерывно.
Проверка направления вращения моторов
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Перевод пульта в режим PPM
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установка пластины для полётного контроллера
-
Установите 4 стойки «папа-мама» 6 мм на PDB.
-
Подключите шлейф питания к PDB.
-
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
Установка полётного контроллера
-
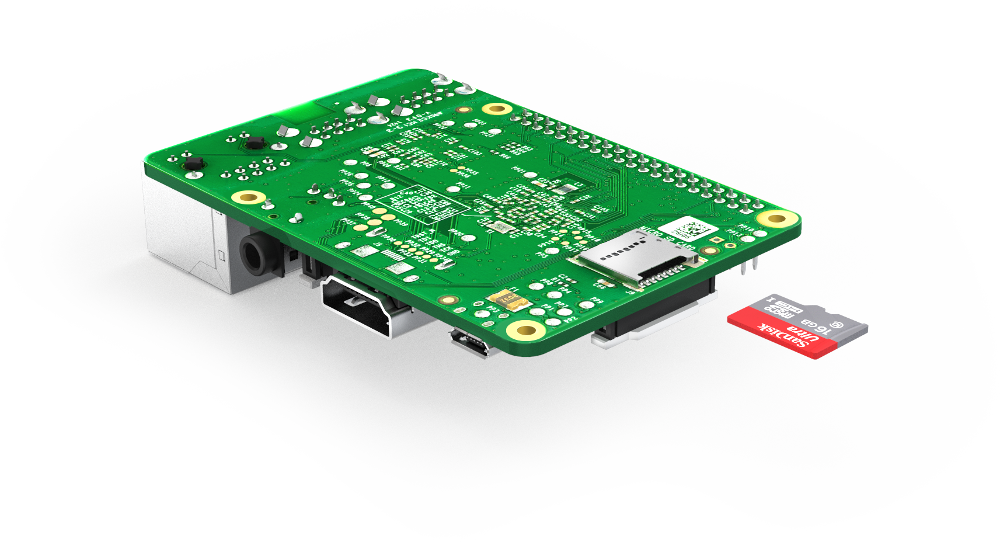
Вставьте карту microSD в полётный контроллер.
-
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
-
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
-
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
-
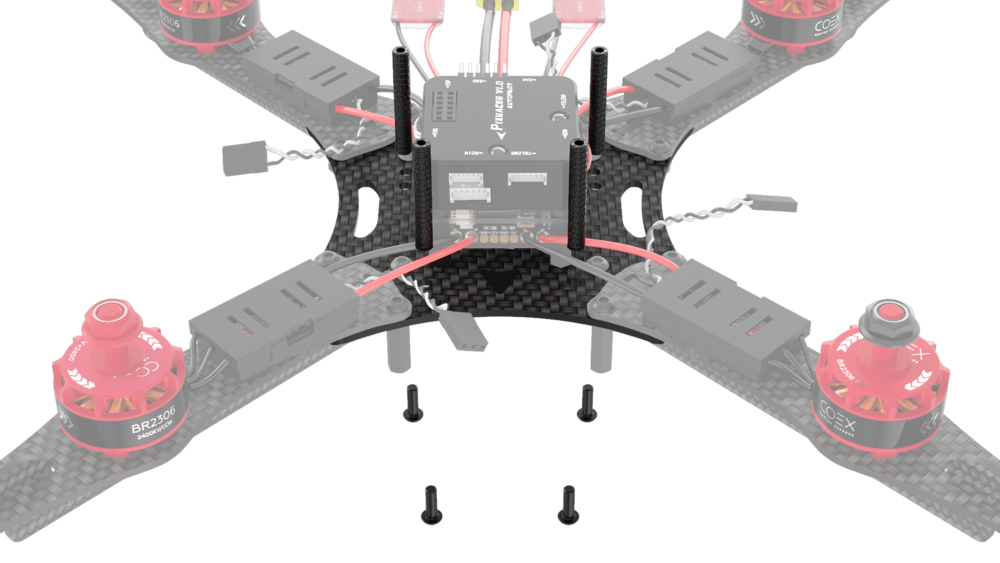
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
-
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
-
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
-
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.
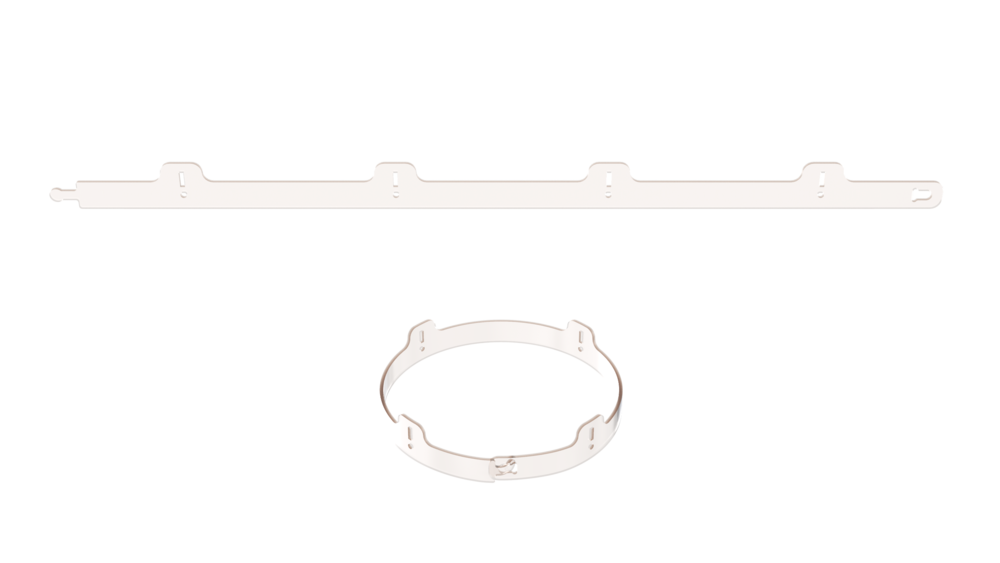
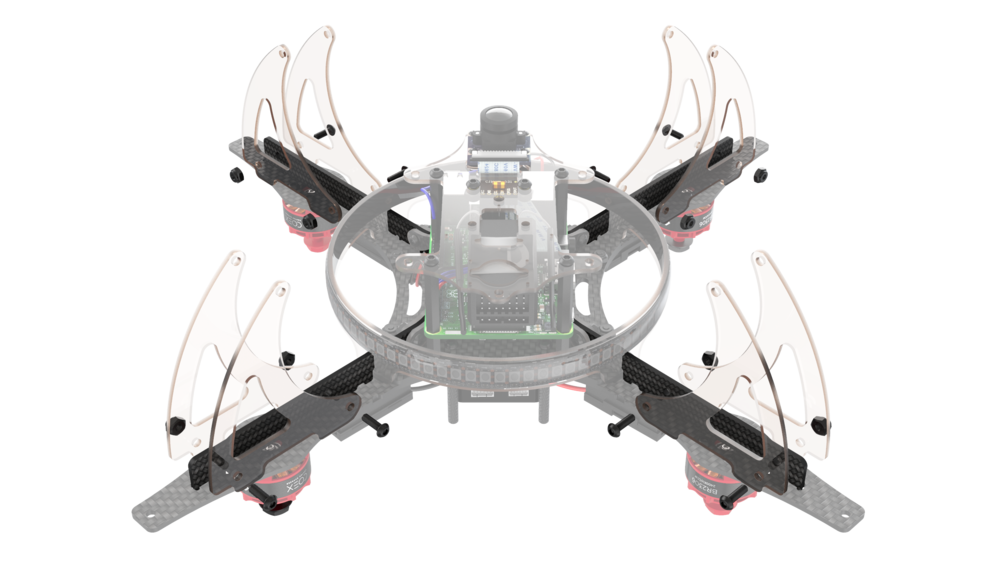
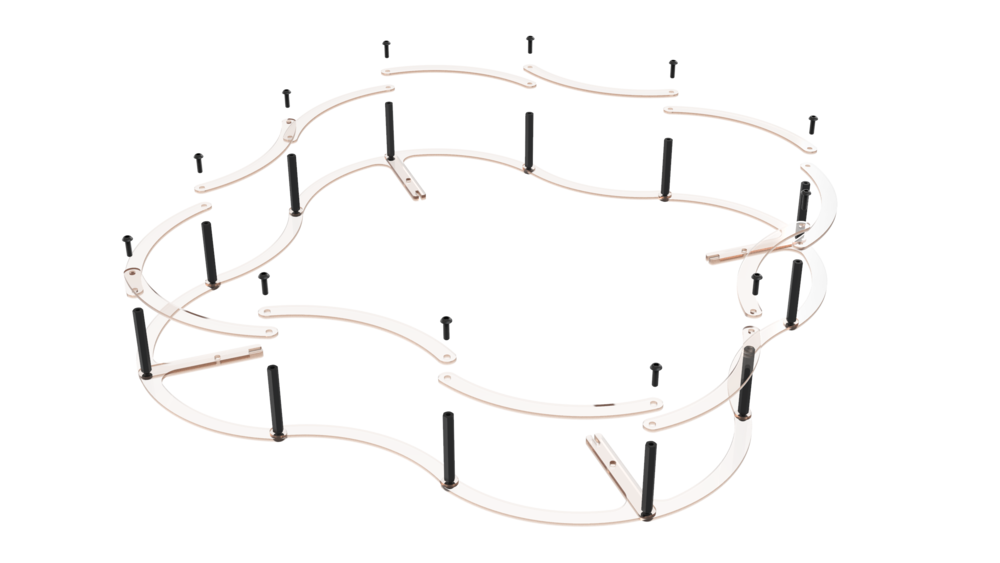
Установка обруча для светодиодной ленты
- Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
-
Установите обруч на раму, используя пазы.
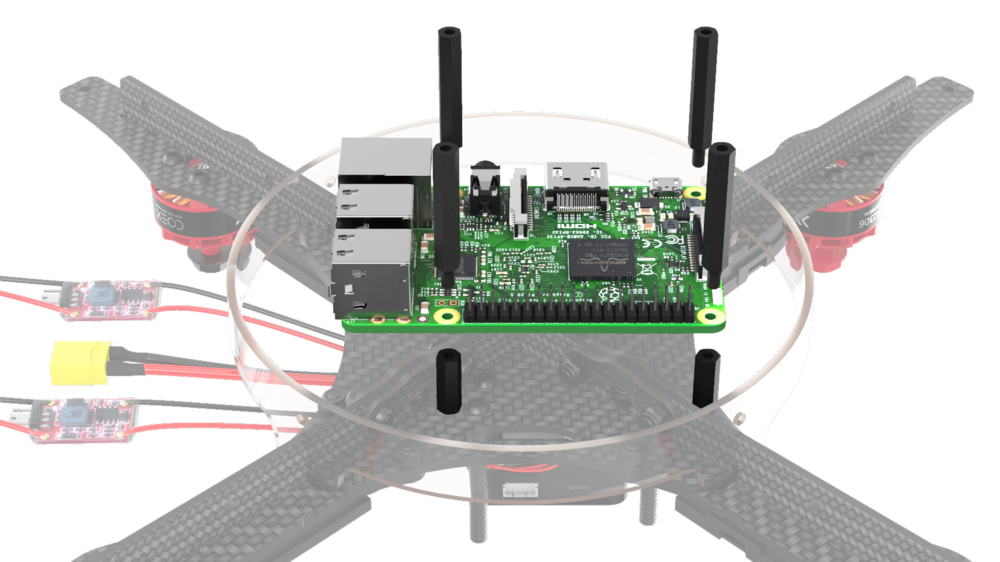
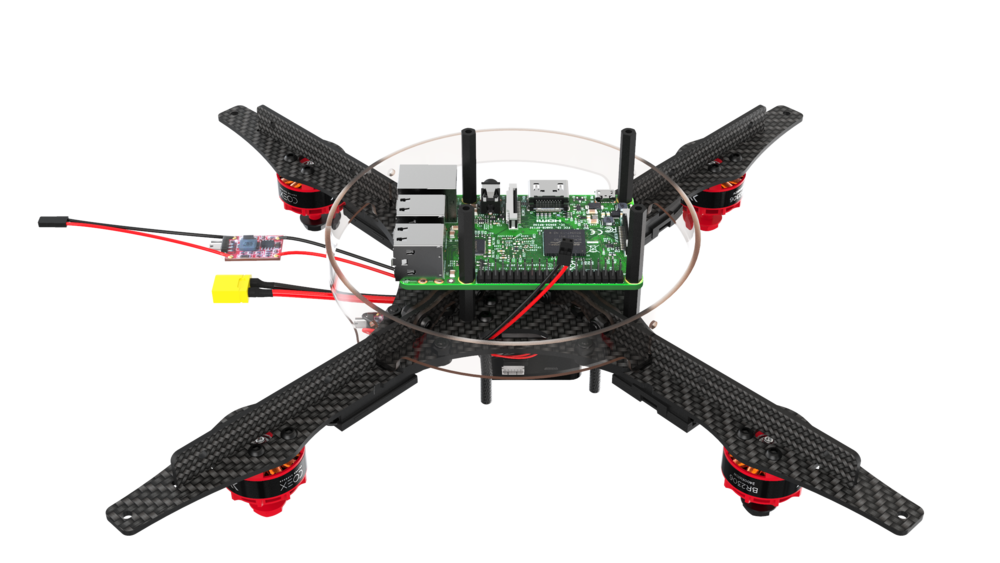
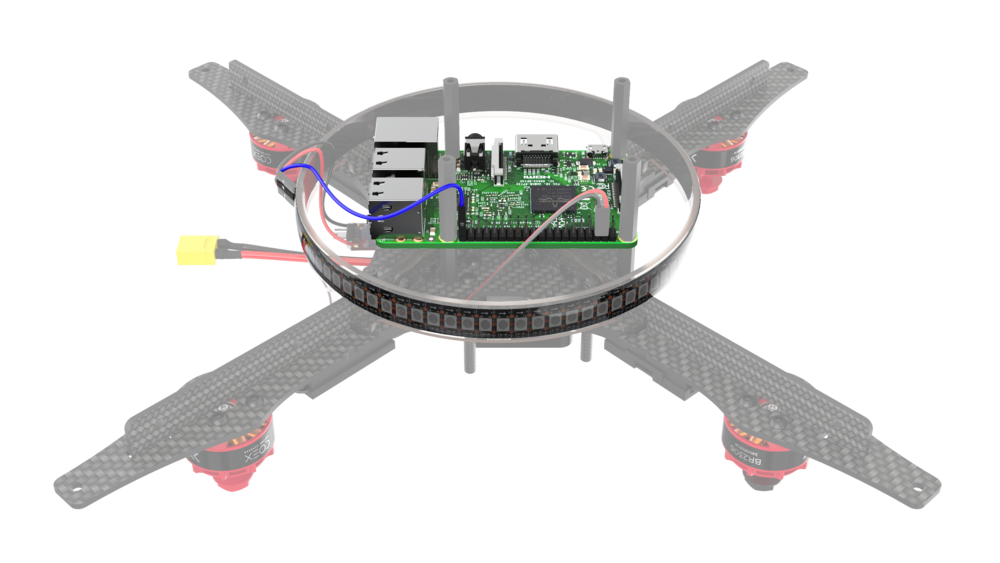
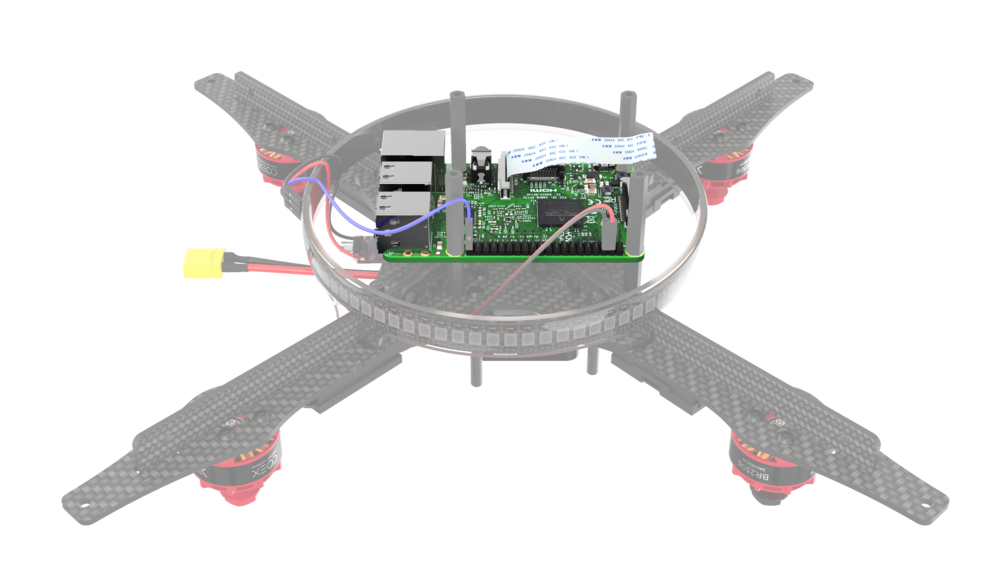
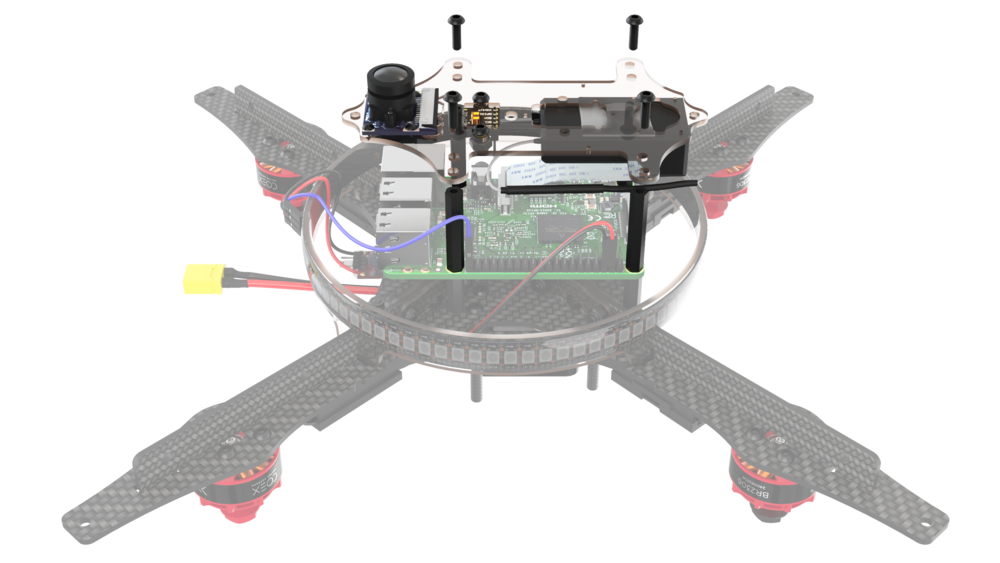
Установка Raspberry Pi
-
Вставьте карту microSD с записанным образом в Raspberry Pi
-
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
-
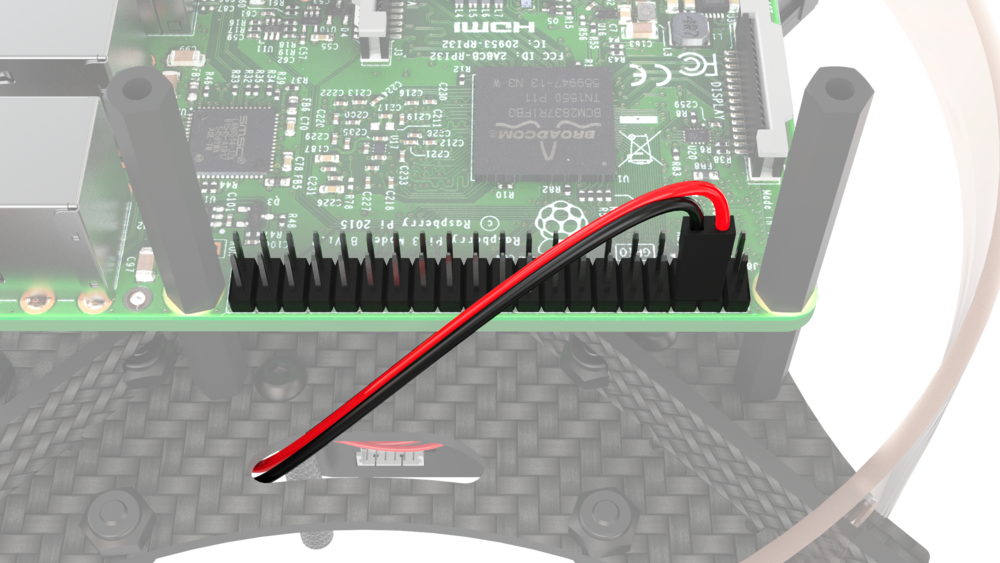
Протяните провода от BEC через паз в центральной раме.
-
Подключите провод питания от BEC к Raspberry, согласно схеме:
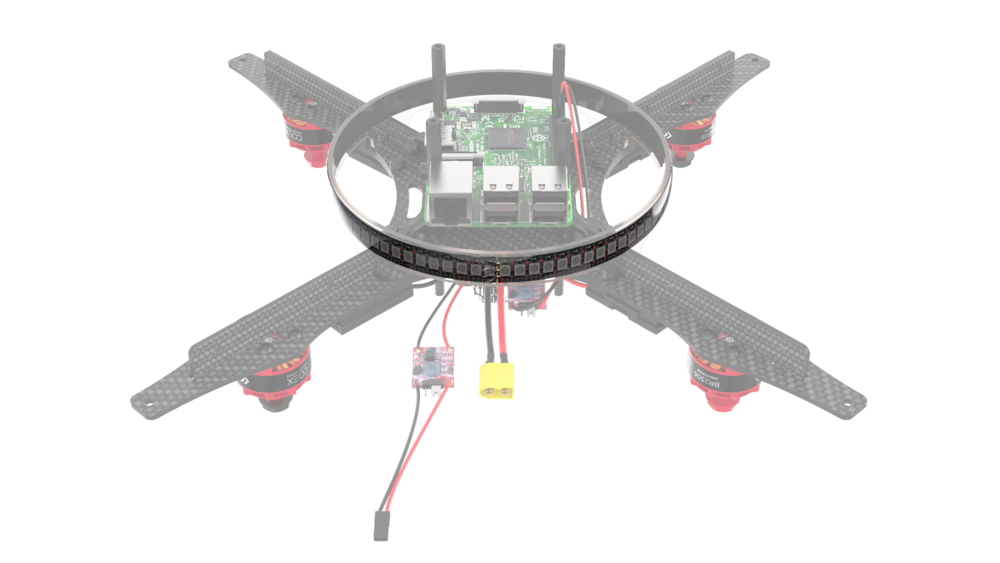
Установка светодиодной ленты на обруч
-
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
-
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.
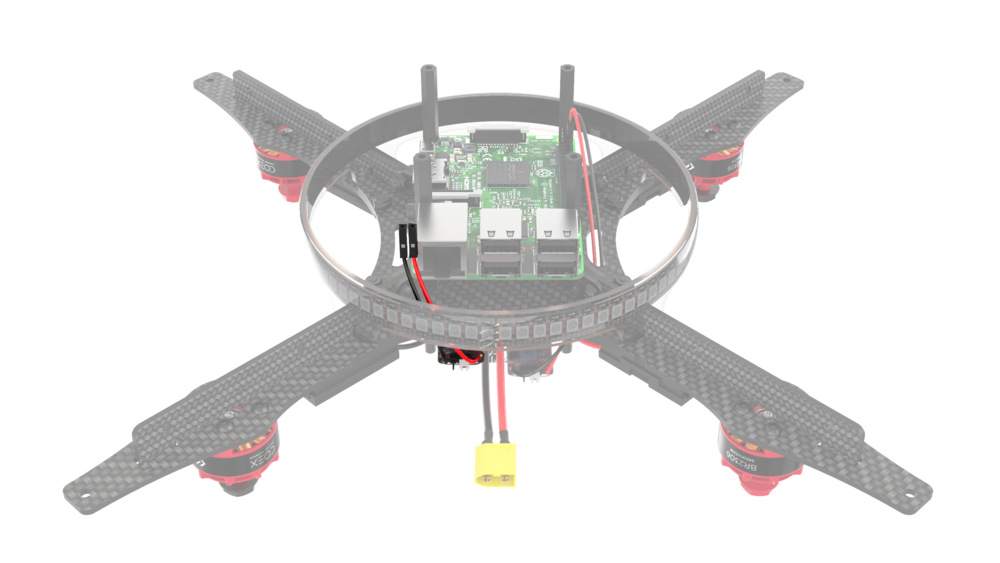
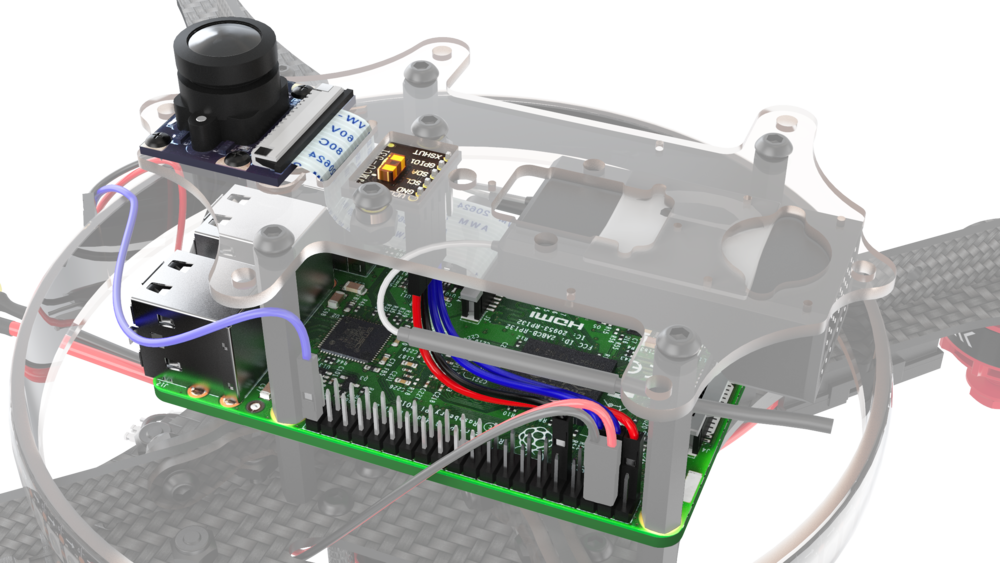
Подключение светодиодной ленты к Raspberry Pi
-
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
-
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
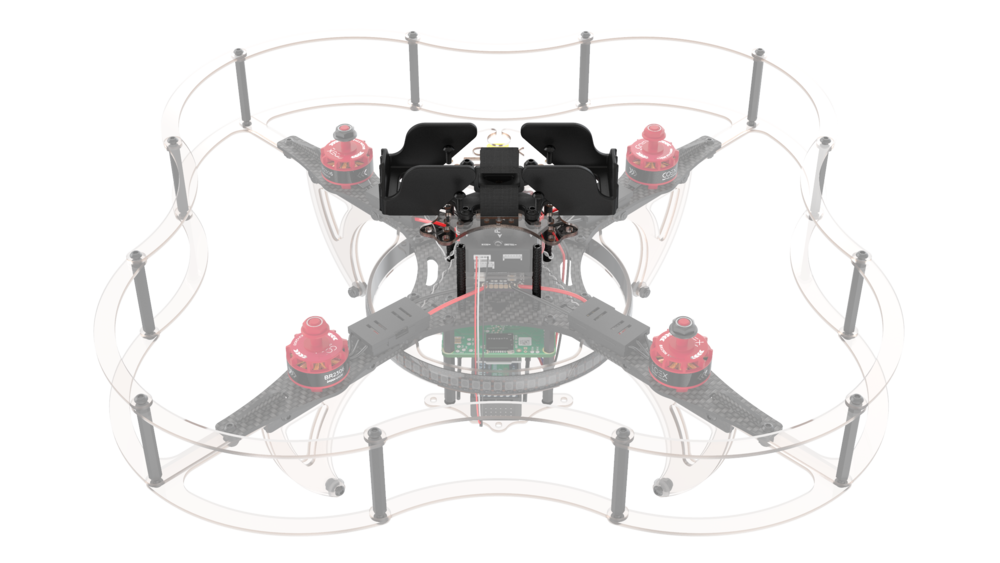
Установка шлейфа для камеры
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
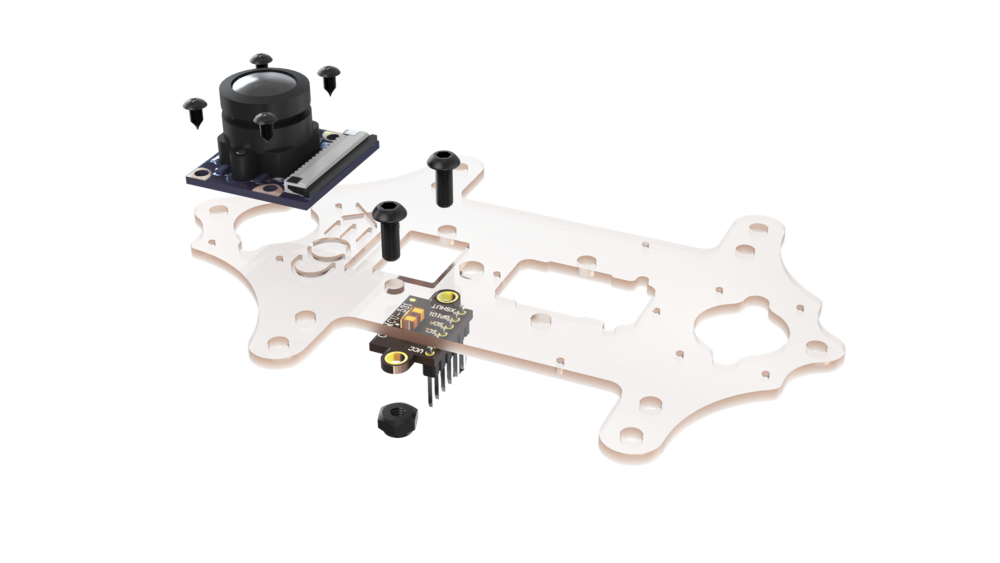
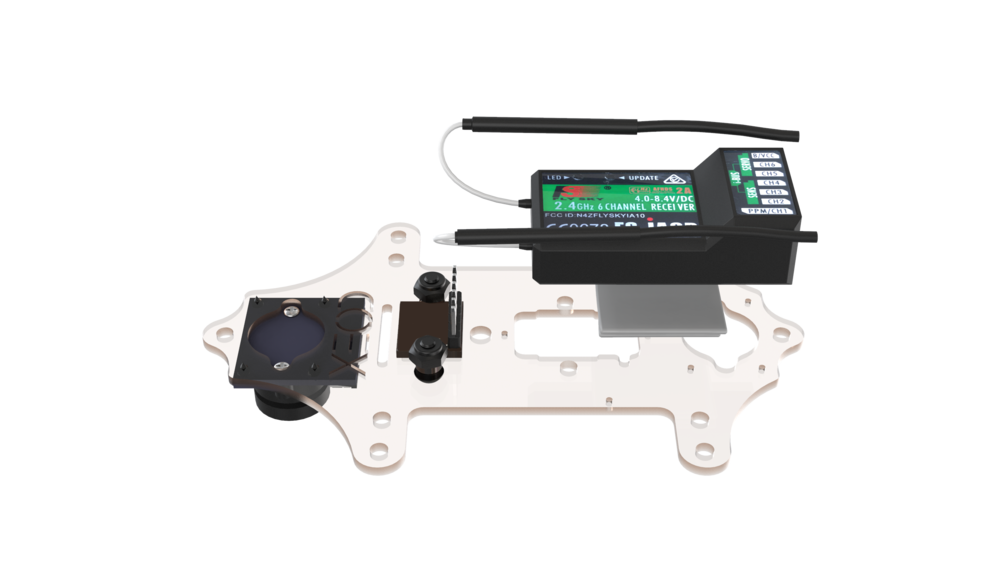
Установка оборудования на нижнюю монтажную деку
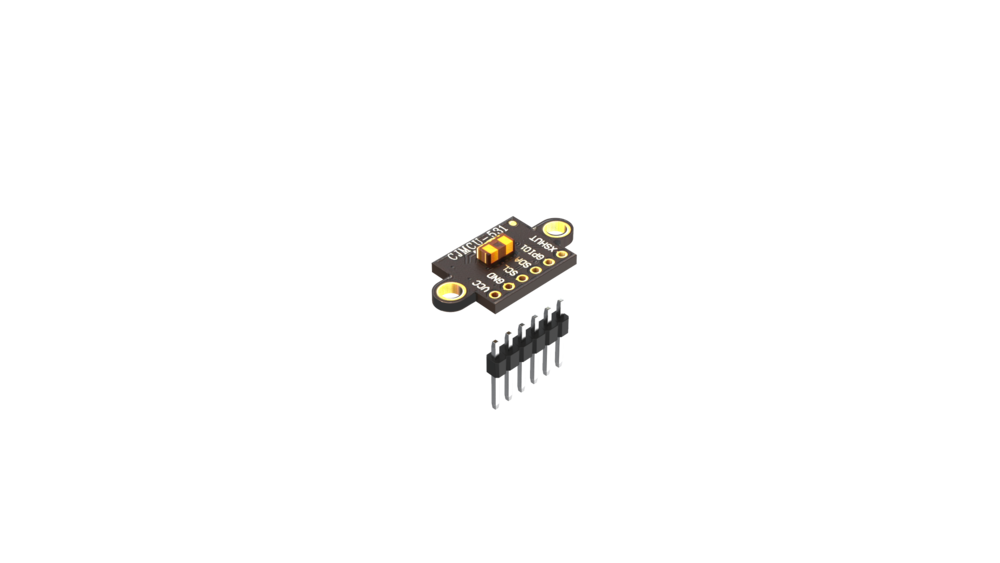
- Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
-
Установите камеру на 4 самореза 2х5.
Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
-
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
-
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
-
Установите нижнюю деку с помощью 4 винтов М3х10.
-
Подключите шлейф к камере.
-
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
-
Разъем SCL к пину 5 (GPIO03).
Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключение кабелей
-
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
-
Подключите кабель к приемнику, соответственно изображению.
Сборка защиты винтов
-
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
Установите верхнюю часть, используя 12 винтов М3х10.
-
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.
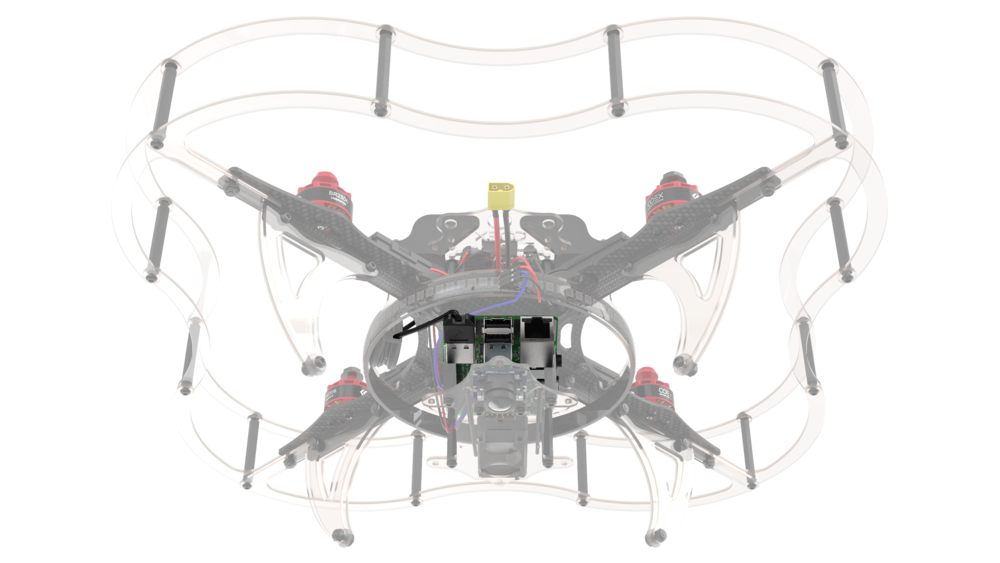
Установка верхней деки на коптер
- Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
- Проденьте в пазы ремешок для фиксации АКБ.
-
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
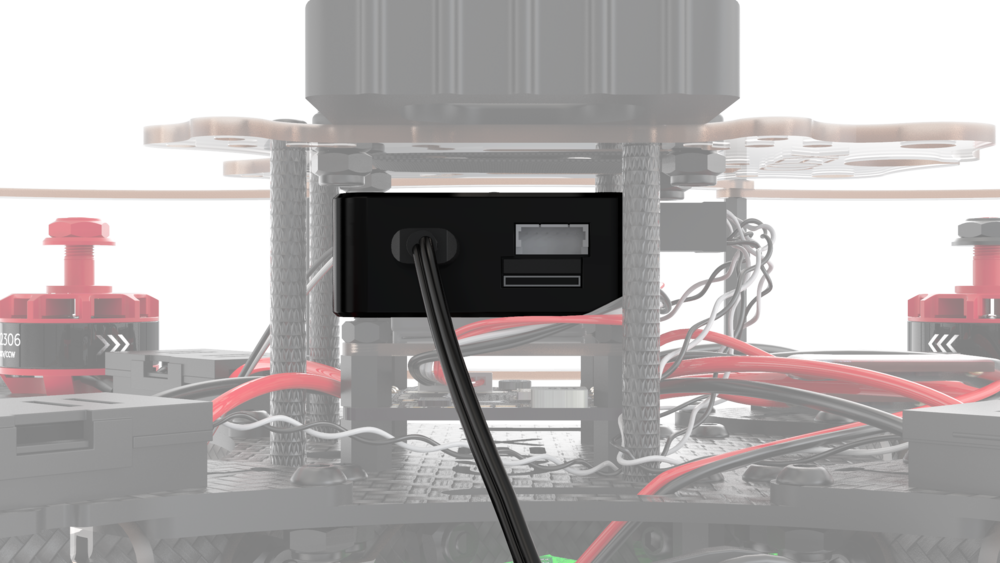
-
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
-
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.
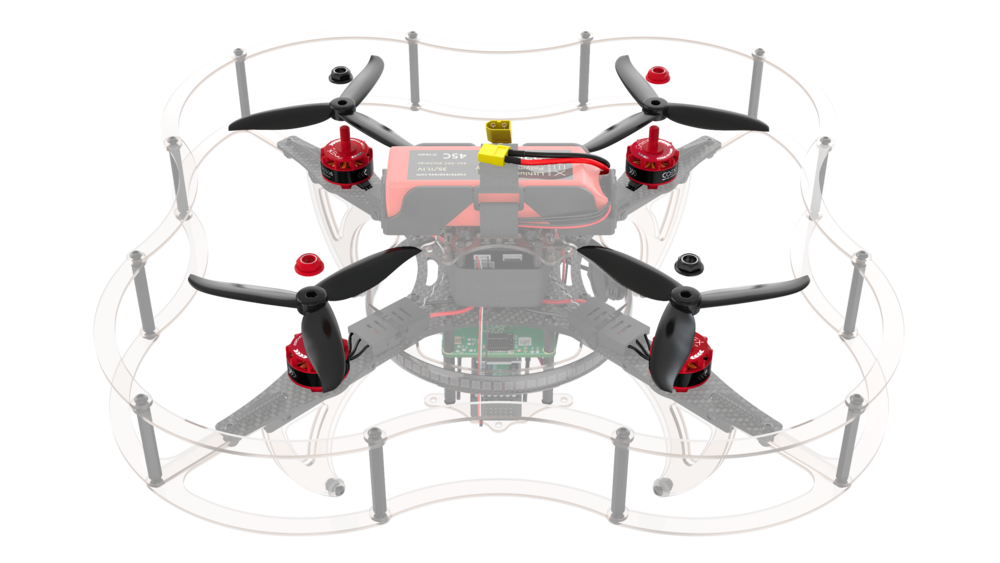
Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
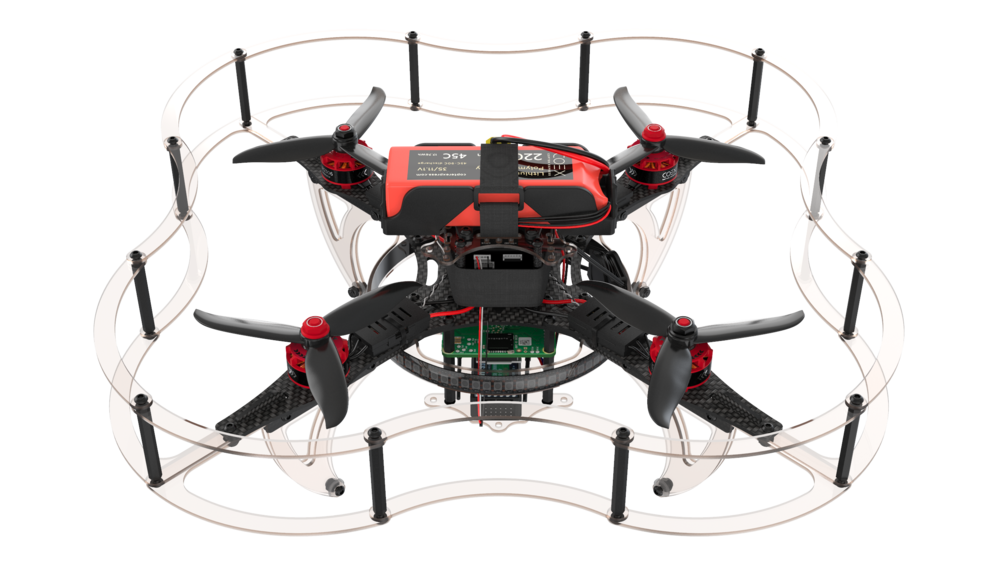
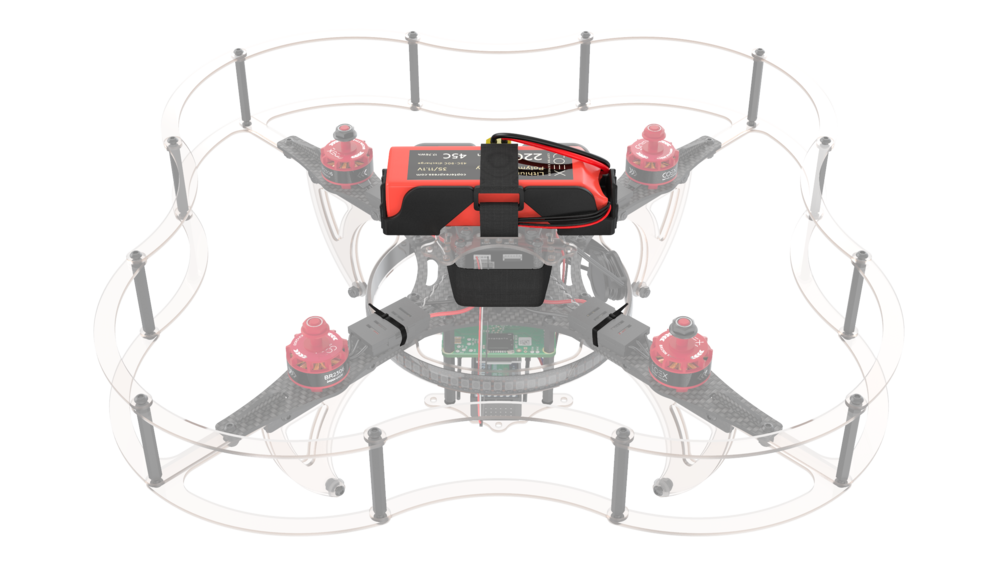
Установка АКБ
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
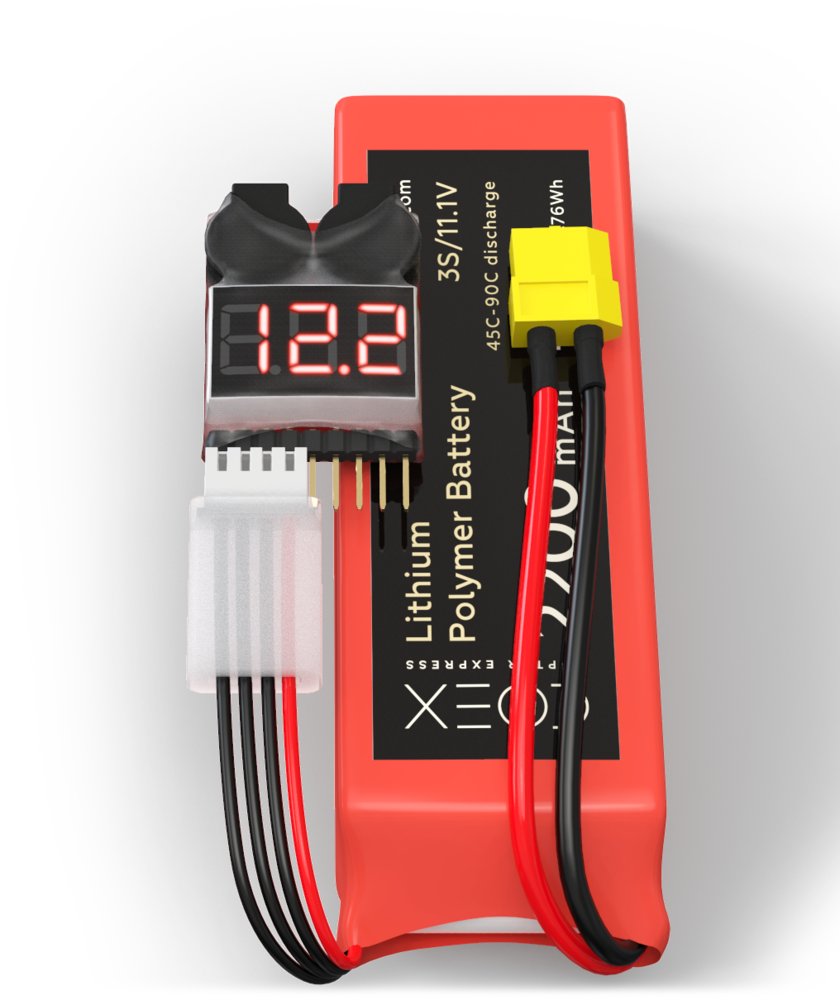
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Размер крепежа
СОВЕТ
Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
| Винт M3x10 | Стойка алюминиевая 40 мм | ||
| Винт M3x8 | Стойка алюминиевая 15 мм | ||
| Винт M3x5 | Стойка нейлоновая 40 мм | ||
| Саморез M2x5 | Стойка нейлоновая 30 мм | ||
| Гайка M3 (самоконтрящаяся) | Стойка нейлоновая 20 мм | ||
| Гайка M3 (нейлоновая) | Стойка нейлоновая 15 мм | ||
| Стойка демпферная | Стойка нейлоновая 6 мм |
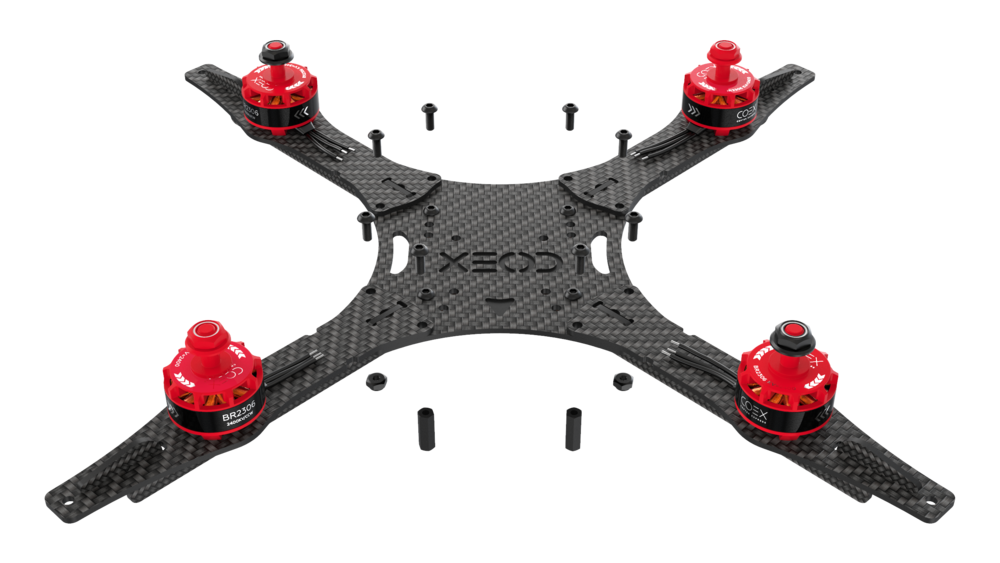
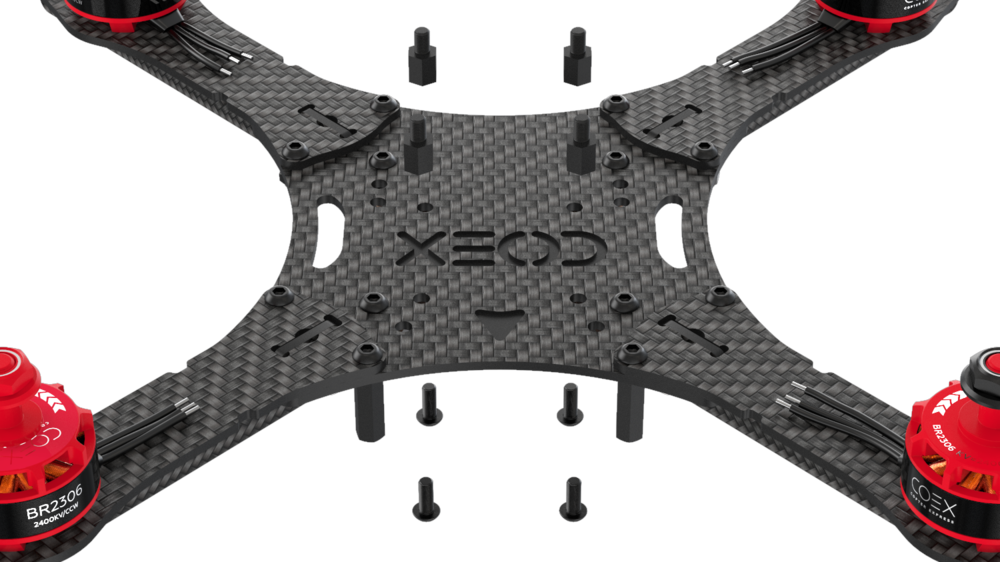
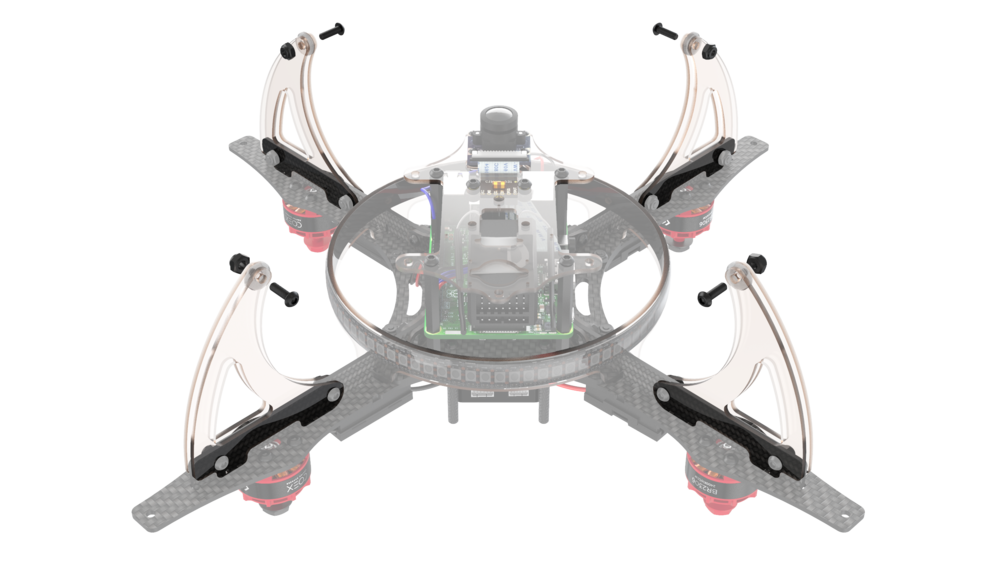
Сборка рамы
-
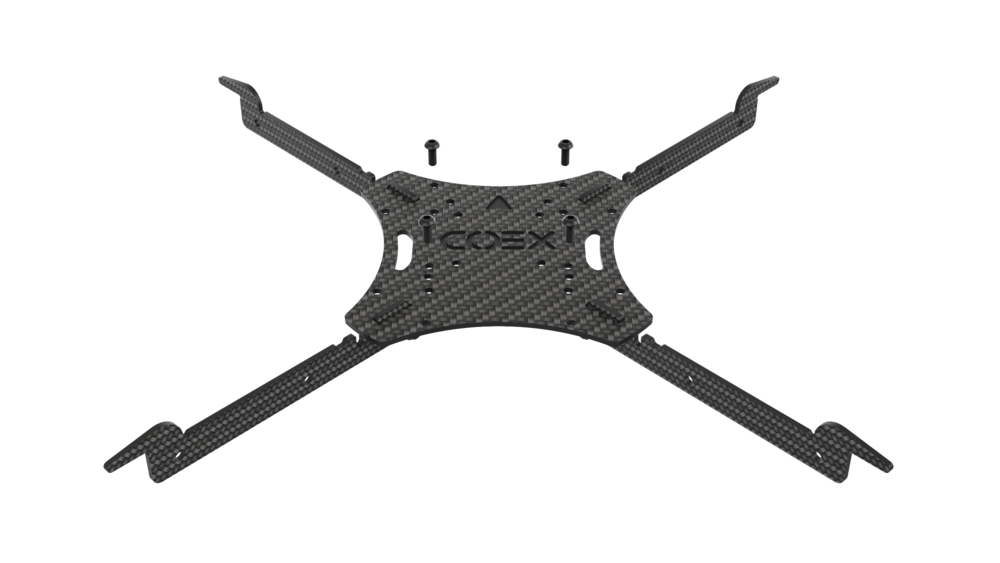
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и гаек с нейлоновой вставкой.
-
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
-
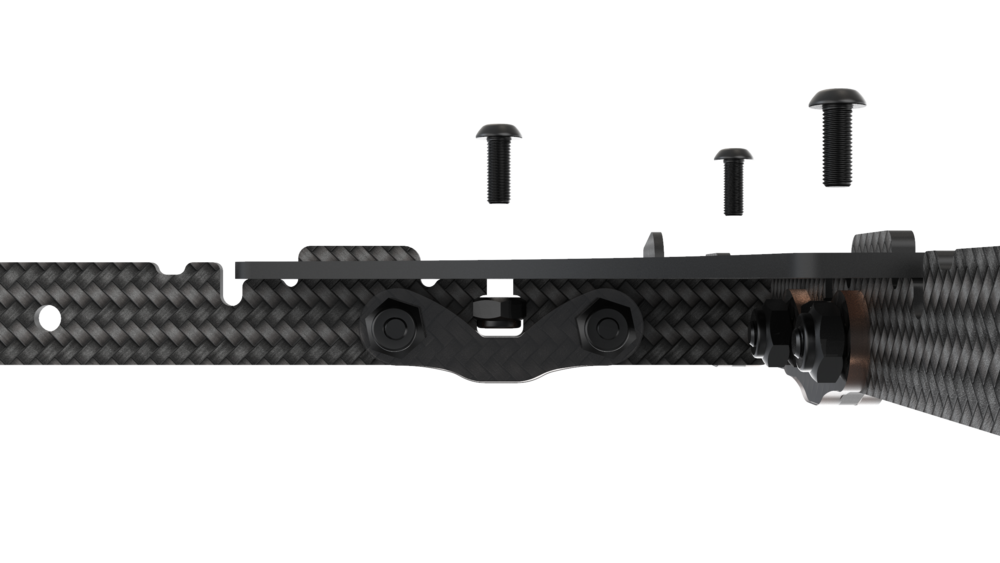
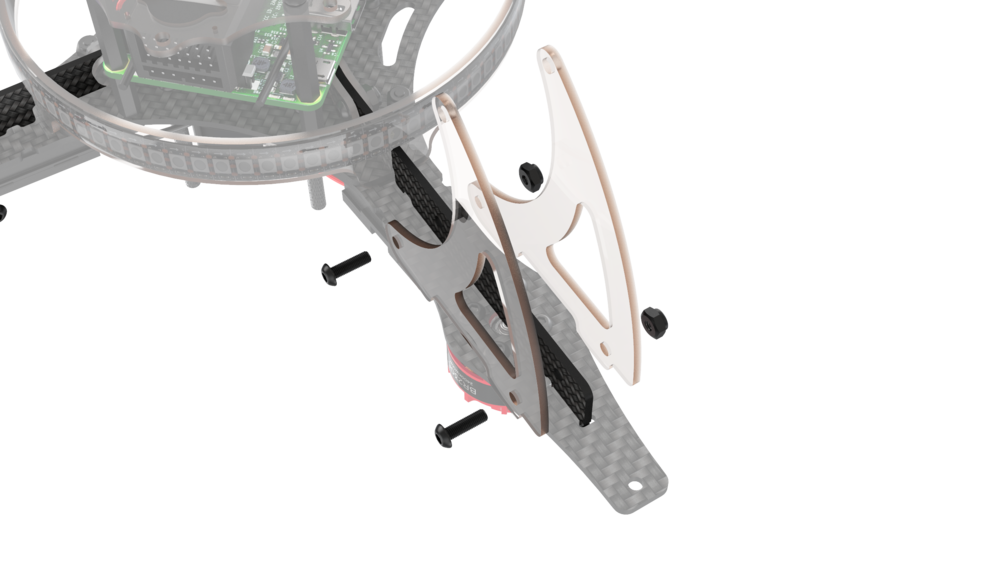
Установите крючок пластины жесткости в паз на луче.
-
Прижмите пластины жесткости к главной деке.
-
Стяните пластины жесткости с помощью малой карбоновой деки.
-
Установите 4 нейлоновые стойки 6 мм и закрепите их с помощью винтов М3х5.
Установка моторов
-
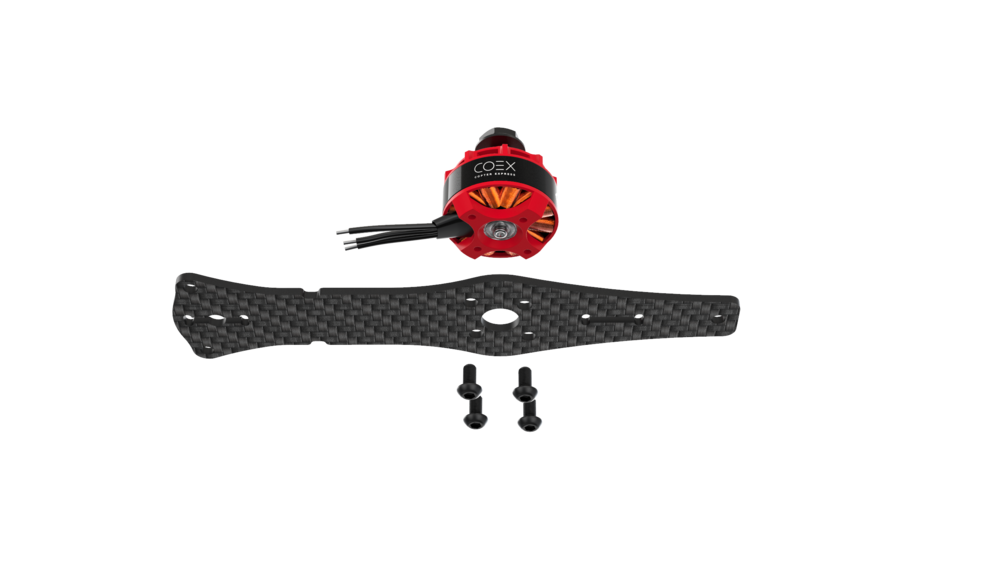
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
-
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.
ВНИМАНИЕ
Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
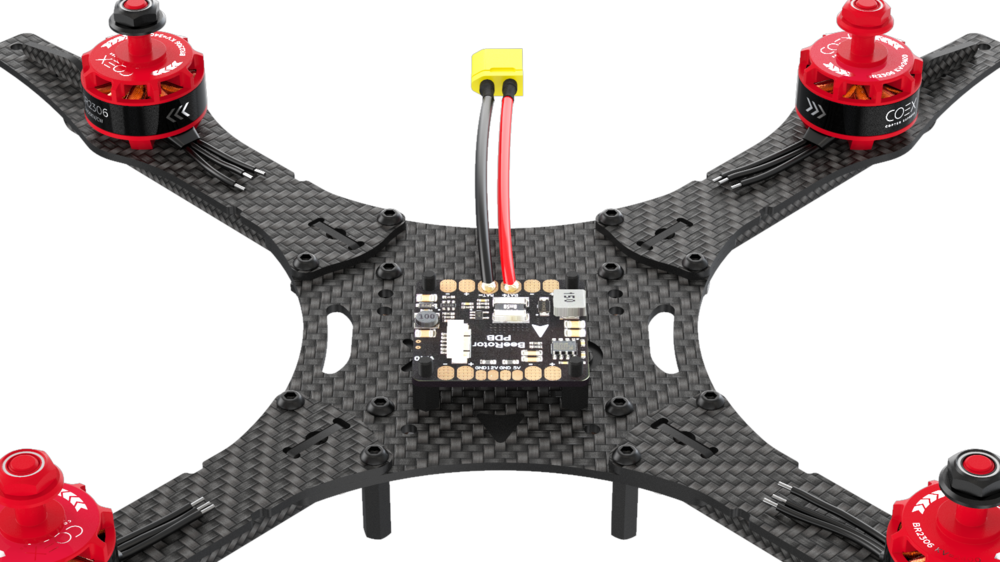
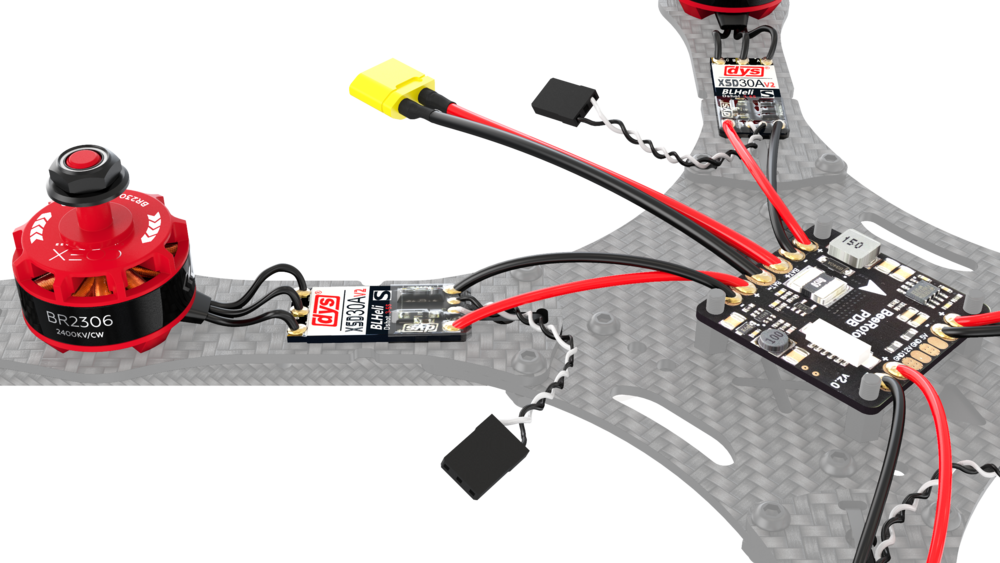
Установка ESC и PDB
-
Подсоедините к моторам регуляторы оборотов (ESC) с помощью разъемов MR30 и закрепите их на лучах с помощью хомутов.
-
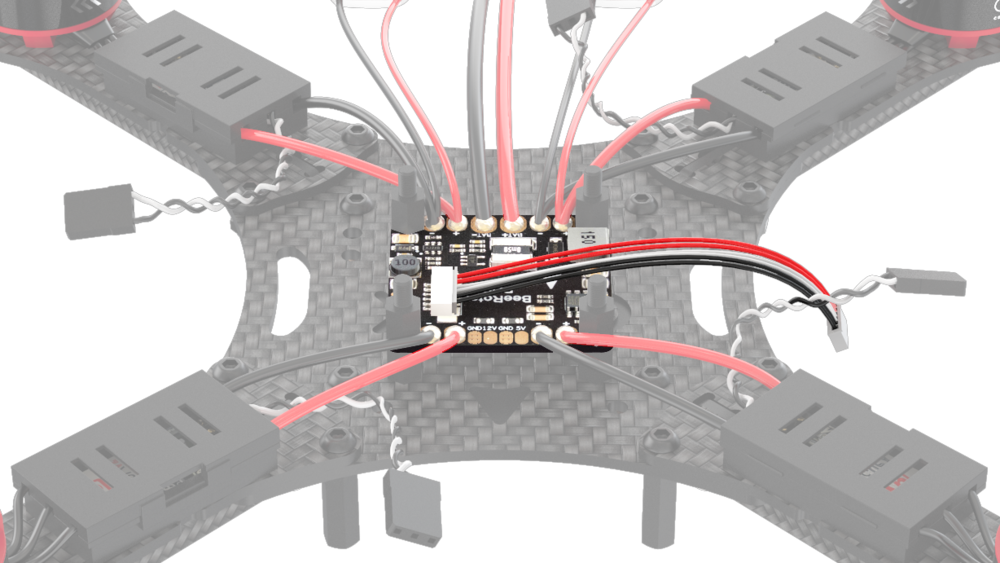
На заранее закрепленные стойки установите плату распределения питания (PDB) и зафиксируйте ее стойками 6мм. Плата распределения питания должна быть установлена таким образом, чтобы кабель подключения питания был направлен в сторону хвоста коптера.
-
Подключите к плате распределения питания силовые выходы регуляторов оборотов.
СОВЕТ
Если вы планируете использовать камеру Hawk Eye, припаяйте провода питания на данном этапе, так как после установки полетного контроллера сделать это будет затруднительно
Установка полетного контроллера
Набор «Клевер 4» позволяет установить различные полетные контроллеры, к примеру COEX Pix и Pixracer.
ВНИМАНИЕ
При установке полетного контроллера обратите внимание на ориентацию платы. Если Вы установите COEX Pix серворазъемами назад (как на изображениях в инструкции) то впоследствии при настройке полетного контроллера в Autopilot Orientation необходимо будет указать значение ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера. Для полетного контроллера Pixracer это не требуется.
COEX Pix
СОВЕТ
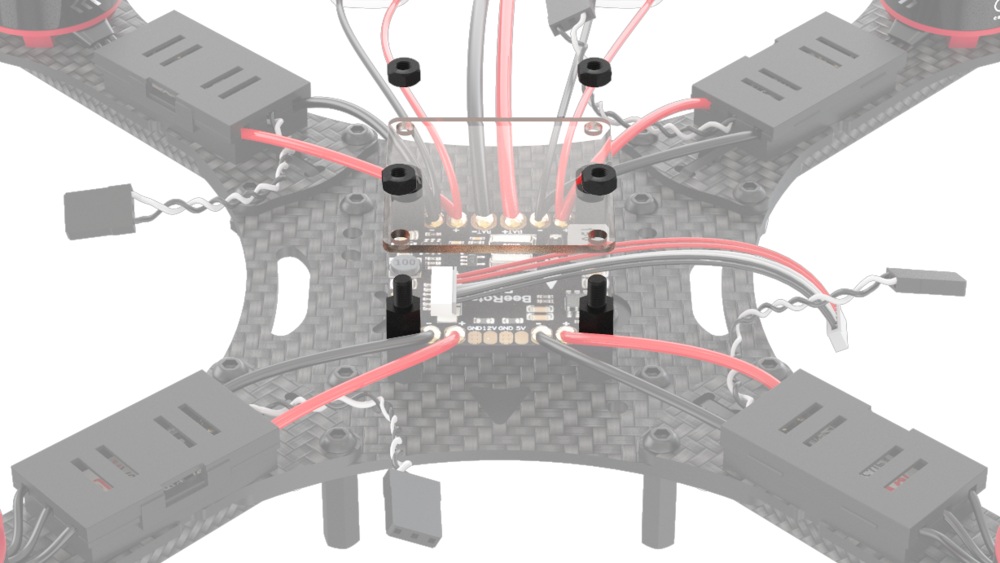
Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Установите демпферные стойки 6мм, на них закрепите COEX Pix с помощью нейлоновых гаек.
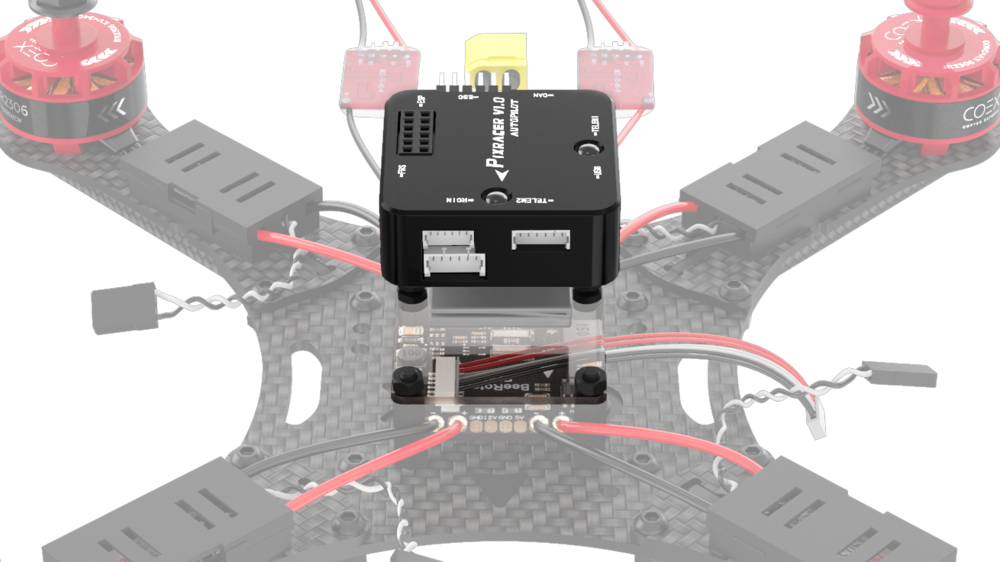
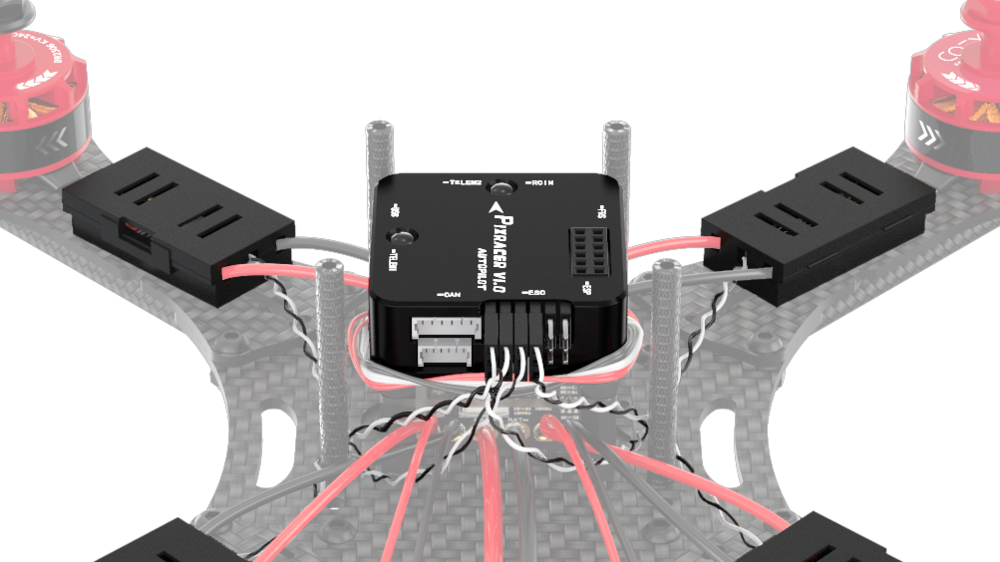
Pixracer
-
Установите малую деку на стойки и зафиксируйте ее нейлоновыми гайками.
-
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.
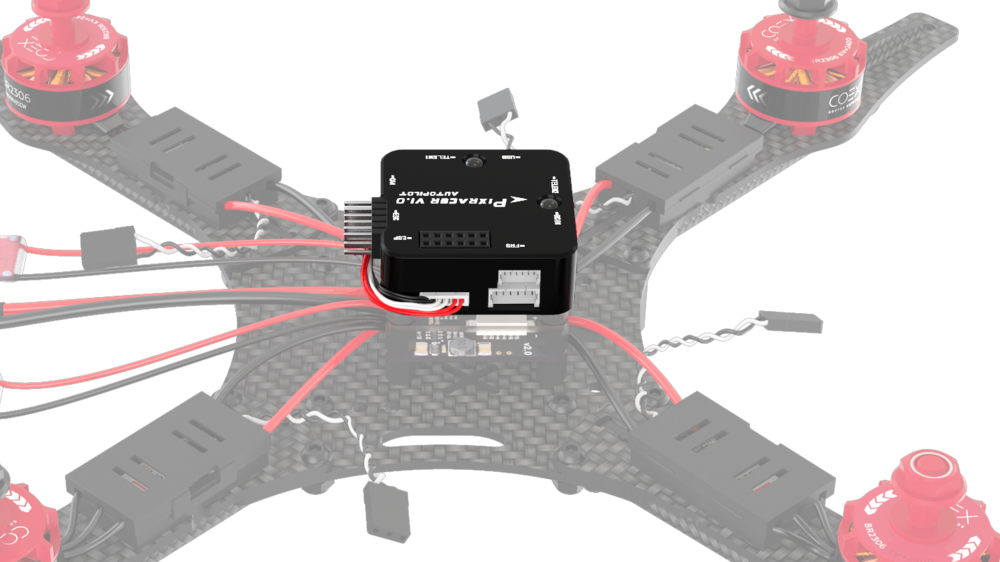
Подключение полетного контроллера
-
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
-
Подключите кабель питания к плате распределения питания (PDB) и соответствующему разъему на полетном контроллере.
-
Установите алюминиевые стойки 40 мм на винты М3х10.
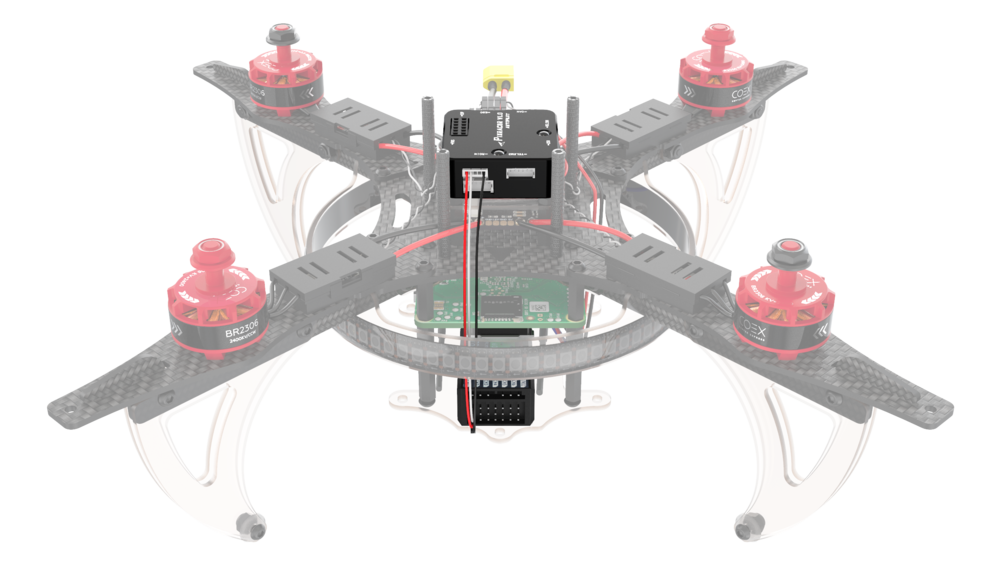
Установка Raspberry Pi
-
На основную деку установите стойки 20 мм, закрепите их с помощью винтов М3х8.
-
На монтажную деку установите стойки 6мм и стойки 30 мм, закрепите их с помощью винт М3х5 и М3х10 соответственно.
-
Установите собранную монтажную деку на основную и закрепите с помощью винтов М3х8.
-
Установите плату Raspberry Pi и зафиксируйте с помощью нейлоновых гаек.
-
На деку захвата установите дальномер с помощью самоконтрящихся гаек и винтов М3х8, и приклейте радиоприемник с помощью двустороннего скотча.
Caution Обратите внимание, что крепящие гайки расположены обратной стороны от платы дальномера, как на схеме, иначе есть большая вероятность повредить плату.
Hint Также плата может быть закреплена на саморезы М2 в соседние отверстия.
-
Установите 4 стойки 20мм и закрепите их с помощью винтов М3х8.
-
На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух саморезов М2х5, в верхнем левом и нижнем правом углах.
-
Установите модуль камеры на деку захвата и закрепите с помощью винтов М3х8.
-
Установите собранную деку захвата и зафиксируйте с помощью винтов М3х8.
-
Подключите к Raspberry Pi дальномер и кабель питания.
-
Подключите радиоприемник к полетному контроллеру используя разъем RCIN.
-
Подключите шлейф камеры к Raspberry Pi.
-
Подключите полетный контроллер к Raspberry Pi с помощью USB-кабеля.
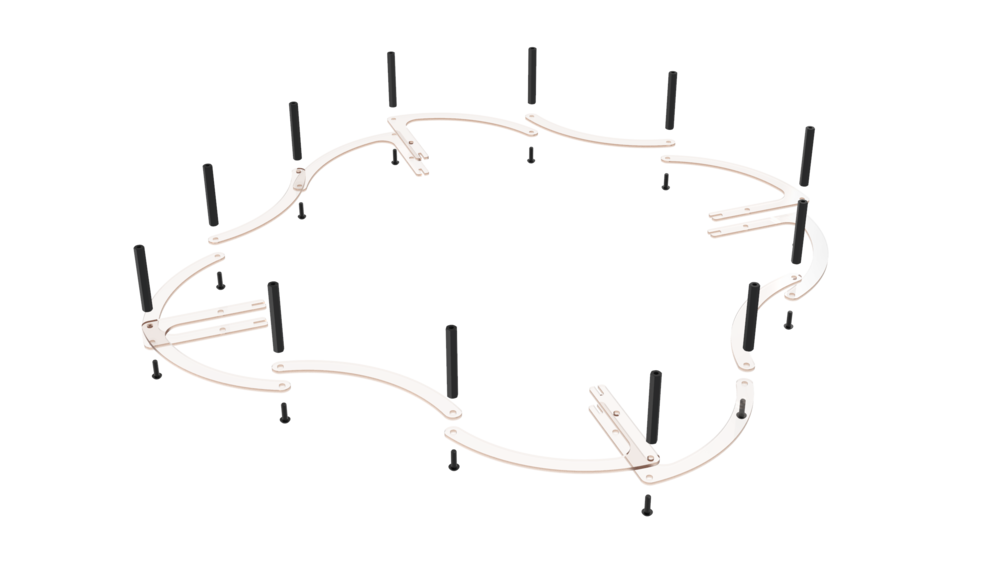
Установка LED ленты и ножек
-
Соберите обруч для светодиодной ленты, объединив замок на концах.
-
Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3-4 хомутов.
-
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х10 используя только крайние монтажные отверстия. Снизу, между пластинами ножек установите демпферное силиконовое колечко.
-
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
-
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х10.
-
Подключите питание светодиодной ленты (красный, черный кабели) в короткий разъем JST на плате распределения питания.
-
Подключите сигнальный выход светодиодной ленты (белый кабель) в Raspberry Ri, к пину GPIO21.
Установка камеры Hawk Eye
Установите скобу на камеру и зафиксируйте её винтами М2.
Зафиксируйте полетный контроллер нейлоновыми стойками 6мм.
Сверху на стойки установите плату камеры, зафиксируйте её нейлоновыми гайками и подключите шлейф.
Установите верхнюю деку. Установите 4 нейлоновых стойки 40мм, вставьте малую монтажную деку вертикально и зафиксируйте сверху еще одной монтажной декой, как показано на фотографии.
Зафиксируйте камеру на малой монтажной деке при помощи двустороннего скотча.
Теперь можно производить настройку камеры.
Установка GPS
Зафиксируйте GPS-приемник на верхней деке при помощи двустороннего скотча. Стрелка на приемнике должна совпадать с передом коптера.
Подключите приемник в разъем GPS полетного контроллера, и зафиксируйте кабель при помощи стяжки.
Настройка и использование GPS описаны в данной статье.
Установка радио-телеметрии
Зафиксируйте модуль телеметрии на нижней деке при помощи двустороннего скотча.
Подключите модуль при помощи кабеля в порт Telem1 полетного контроллера. Теперь можно выполнить настройку.
Установка защиты
-
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х10.
-
Соберите верхний уровень защиты с помощью винтов М3х10.
-
Установите монтажную деку и закрепите ее винтами М3х8.
-
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х10.
СОВЕТ
Дрон собран, далее произведите настройку.
- Home
- Дроны
- Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
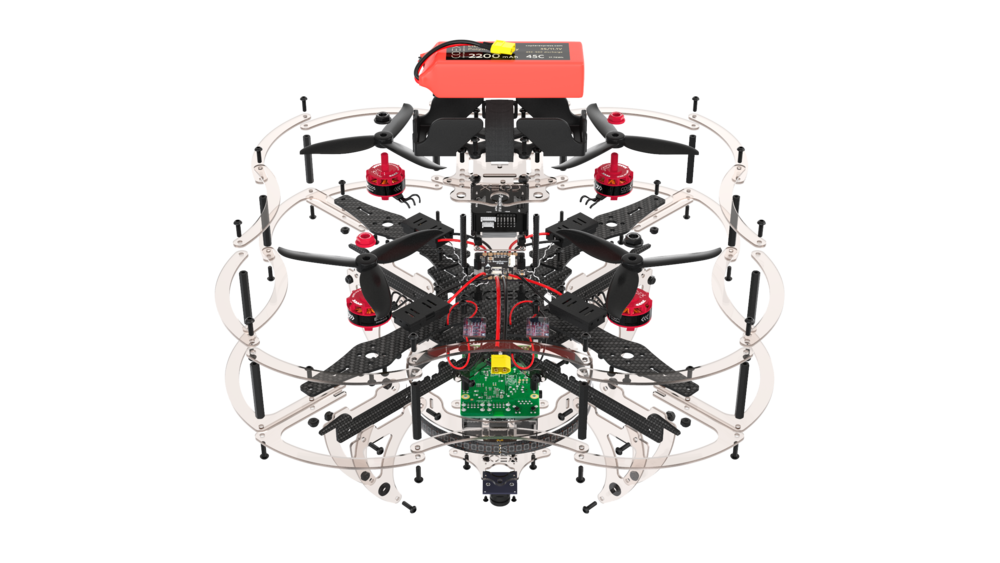
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
Стоимость по запросу
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE»
Учебный набор «COEX Клевер 4 Code» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
-
Детали
Детали
| Габариты | 35.5 × 35.5 × 19.5 см |
|---|
Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
Модель
СОЕХ КЛЕВЕР 4
WORLDSKILLS RUSSIA
Размер — 355x355x195 мм
Расстояние между моторам по диагонали — 234 мм
Диаметр пропеллеров — 5 дюймов
Максимальный взлетный вес — 1 кг
Максимальная скорость — 72 км/ч
Максимальное время полета — 15 мин
Диапазон рабочих температур — От 0°С до +40°С
Максимальная высота полета — 500 м
Provide feedback
Saved searches
Use saved searches to filter your results more quickly
Sign up
Appearance settings
Содержание
- COEX Клевер 4 Pro – Сборка
- Для просмотра онлайн кликните на видео ⤵
- Coex клевер 4 pro инструкция сборки
- Белый клевер: как сажать для газона и ухаживать за ним
- Содержание:
- Сорта и разновидности
- Преимущества и недостатки белого клевера
- Посадка белого клевера в открытом грунте
- Выбор площадки
- Подготовка почвы и посев
- Уход за растением
- Полив
- Прополка и удаление высохших цветов
- Стрижка
- Удобрение и подкормка
- Размножение растения
- Болезни и вредители
- Тендер 147641095 — Поставка конструктора программируемого квадрокоптера «COEX Клевер 4 Code»
- Coex Клевер 4 Pro Сборка
COEX Клевер 4 Pro – Сборка
Для просмотра онлайн кликните на видео ⤵

Сборка квадрокоптера «Клевер» 1 часть Подробнее

Работа с камерой 4K на Клевере 4 Pro Подробнее

Copterhack2019. Лекция 4 — Автономное управление Клевер 4. Подробнее

Клевер 2. Сборка (Часть 4). Рама и подключение пульта Подробнее
Клевер 2. Сборка (Часть 5). Полетный контроллер Подробнее

Клевер 2. Настройка (Часть 1). QGround Control. Настройка пульта Подробнее

Copterhack2019. Лекция 1 — Введение Подробнее
Клевер 2. Сборка (Часть 6). Окончательная сборка рамы. Кабель менеджмент Подробнее
Сборка квадрокоптера «Клевер» 2 часть Подробнее

Клевер 2. Сборка (Часть 2). Плата распределения питания Подробнее
COEX 🍀 — Quadcopter build tutorial Подробнее
Клевер 2. Настройка (Часть 2). Калибровка датчиков. Настройка полетных режимов Подробнее
Клевер 2. Сборка (Часть 1). Электромотор и регулятор Подробнее
Квадрокоптер своими руками [Часть 1 — сборка и подключение] Подробнее
Клевер 2. Сборка (Часть 3). Батарейный блок Подробнее

Клевер 2. Настройка (Часть 3). Предполетная подготовка и полет Подробнее
13 июля. Занятие #1: Сборка. Практическое занятие Подробнее
МК Игоря Смирнова- Апгрейд квадрокоптера Подробнее
Источник
Coex клевер 4 pro инструкция сборки
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
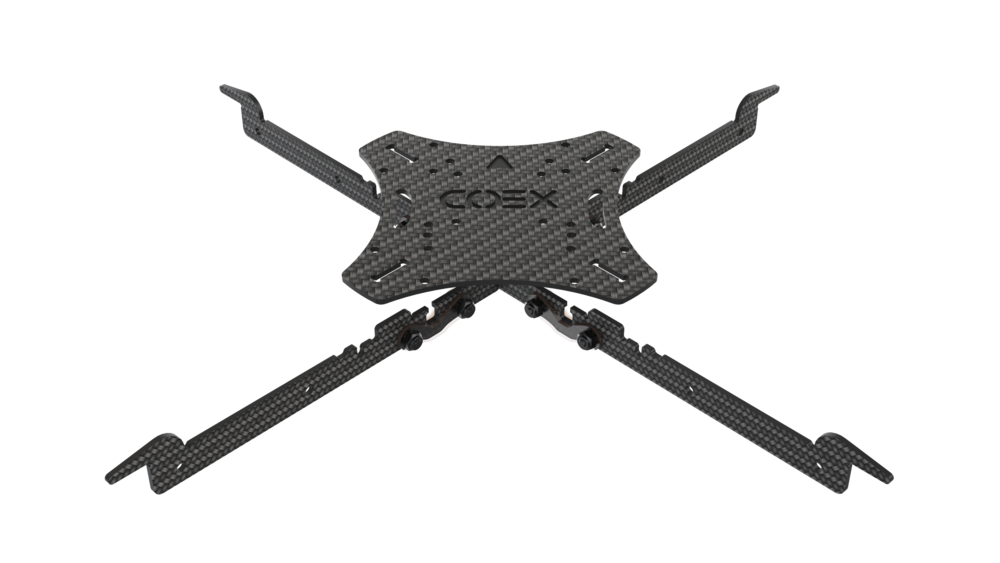
Используя пазы, установите сверху карбоновую центральную деку.
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).

Скрутите медные жилы.
Установите мотор на луч.
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.
Повторите эти действия для остальных моторов.
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.

Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.

- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.

Установите PDB на стойки.
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.
- Припаяйте фазные провода моторов к регуляторам.
Припаяйте силовые провода регуляторов к контактным площадкам платы ( красный к «+», черный к «-»).
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов ( красный к «+», черный к «-»).
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
Переключатели A, B, C, D в положение «от себя».

Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
Светодиод на радиоприемнике должен мигать.


Зажмите кнопку BIND KEY на пульте.
Включите пульт (перещелкните POWER, не отпуская BIND KEY).

Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать серво-тестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установите 4 стойки «папа-мама» 6 мм на PDB.
Подключите шлейф питания к PDB.
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
Вставьте карту microSD в полётный контроллер.

Установите полетный контроллер на пластину с помощью двухстороннего скотча.
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.

Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.

Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.

Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.
- Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
Установите обруч на раму, используя пазы.

Вставьте карту microSD с записанным образом в Raspberry Pi
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
Протяните провода от BEC через паз в центральной раме.
Подключите провод питания от BEC к Raspberry, согласно схеме:
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).


Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
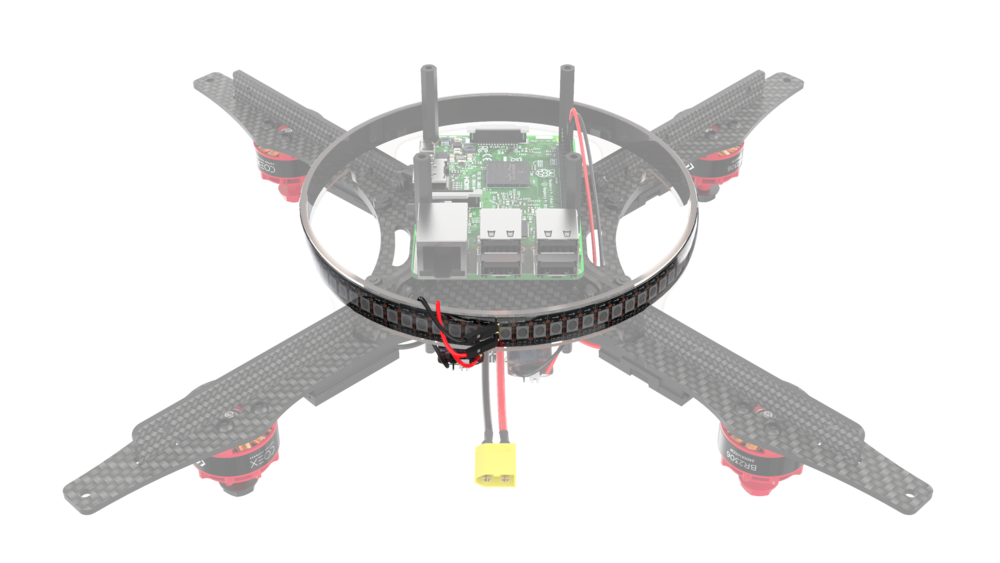
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
- Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
Установите камеру на 4 самореза 2х5.
Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
Установите нижнюю деку с помощью 4 винтов М3х10.
Подключите шлейф к камере.
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
Разъем SCL к пину 5 (GPIO03).
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.

Подключите кабель к приемнику, соответственно изображению.

Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
Установите верхнюю часть, используя 12 винтов М3х10.
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.

- Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
- Проденьте в пазы ремешок для фиксации АКБ.
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.

Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Документация Клевера доступна по лицензии Creative Commons «Attribution-NonCommercial-ShareAlike» 4.0 Всемирная.
Источник
Белый клевер: как сажать для газона и ухаживать за ним
Выращивание клевера улучшит внешний вид участка и урожайность садовых растений.
Содержание:
- Сорта и разновидности
- Преимущества и недостатки белого клевера
- Посадка белого клевера в открытом грунте
- Выбор площадки
- Подготовка почвы и посев
- Уход за растением
- Полив
- Прополка и удаление высохших цветов
- Стрижка
- Удобрение и подкормка
- Размножение растения
- Болезни и вредители
Раньше посадка клевера со светлыми цветами, который еще называют кашкой или трилистником, была очень популярна. Однако потом про него забыли, а зря. Все клеверные сорта — прекрасные медоносы, поэтому их выращивание улучшит внешний вид участка и урожайность садовых растений.
Это декоративное газонное растение будет даже в октябре радовать вас яркими листьями и красивыми цветами, если правильно за ним ухаживать, что, как вы узнаете из этой статьи, под силу каждому.
Сорта и разновидности
Перед тем как сажать белый клевер, нужно выбрать подходящий для газона сорт. Существует несколько разновидностей растения:
- Луговой — имеет высокий стебель до 50 см и розовые цветы. Отличительная черта — светлые пятна в середине листьев.
- Ползучий, или газонный, — приземистая разновидность с коротким стеблем. Неприхотлив. Посадка и уход за белым ползучим клевером не составят труда даже для новичка.
- Горный — растение со стеблем длиной до 60 см и крупными светлыми цветами.
- Красный — необычный сорт с ярко-красными цветами и изумрудными листьями.
Для декоративных целей чаще всего выбирают газонные сорта со светлыми цветами:
- Atropurpurea — имеет красные листья с зеленой каймой. Необычно выглядит и хорошо растет;
- Purpurascens с красновато-коричневыми листочками необычной четырехлистной формы;
- «Барбиан» — быстро дает побеги, не боится морозов, устойчив к болезням;
- шведский гибрид зацветает беловато-розовыми цветами. Цветет даже в сентябре, до середины месяца;
- «Лифлекс» — рано и обильно зацветает;
- «Луговик» — низкорослый, плотный, хорошо укореняющийся;
- «Нанук» и «Ривенделл» — высокодекоративные сорта с крупными цветами;
- «Тасман» — неприхотлив, быстро восстанавливается, не боится болезней и холодных зим;
- «Пиполина» — микроклевер с небольшими листьями и мелкими цветочками.
Количество сортов постоянно растет, что позволяет выбрать подходящий вариант для посева на садовом участке или возле дома на огороде.
Преимущества и недостатки белого клевера
- Красивый внешний вид при минимальном уходе. Растения образуют сплошную поросль, через которую не пробиваются сорняки.
- Эта газонная трава относится к бобовым, поэтому богата азотом, а значит, может использоваться как сидерат.
- Растение-медонос — прилетающие пчелы опыляют плодовые растения, повышая урожай.
- После скашивания становится питательным кормом для животных.
- Эстетичен — клеверные посадки подходят для оформления дорожек, создания лужаек, приствольных кругов, «живых бордюров», фото которых можно найти в интернете.
- Быстро расползается и распространяется.
- После скашивания выглядит непрезентабельно.
- При выращивании выживает со своей территории другие растения.
Преимуществ у этой культуры гораздо больше, чем недостатков, поэтому посеять её на своём участке будет верным решением
Посадка белого клевера в открытом грунте
Посеять растения в открытом грунте несложно. Уход также не доставляет хлопот. Единственная задача — не допустить неконтролируемого распространения по участку.
Многих интересует, когда сеять семена ползучего белого клевера для газона — весной или осенью. Когда сажать белый клевер, решайте сами: при правильном уходе и осенняя и весенняя посадки одинаково успешны. Однако помните, что осенний посев проводят за четыре недели до первых заморозков. Время, когда сеют красный клевер, совпадает со сроками посадки ползучего сорта.
Выбор площадки
Растения хорошо растут на ровной солнечной поверхности. В тени они плохо развиваются и гибнут.
Подготовка почвы и посев
Перед посадкой клевера осенью или весной землю перекапывают и рыхлят, и лучше это сделать за месяц до запланированного посева, когда можно удалить подросшие сорняки, а за 2–3 дня до срока провести повторную перекопку и рыхление.
Семечки этой культуры очень мелкие и легкие, поэтому перед посадкой их смешивают с песком, опилками и почвой, взятыми в равных пропорциях. На 90 кв. м площади понадобится 50–60 г семян. Посев клевера осенью или весной проводят методом разбрасывания. После посадки нужно вручную разровнять землю граблями с перевернутыми зубьями.
Место посева клевера осенью или весной поливают и повторяют полив ежедневно, пока не появятся первые ростки с листьями. Как правило, этот процесс занимает 2 недели.
Уход за растением
Клевер не требует особого ухода, хорошо растет и быстро восстанавливается после вытаптывания и скашивания. Растения мягкие на ощупь, по такой траве приятно ходить босиком.
Полив
При посеве клевера под зиму или весной частый полив не требуется, достаточно включать разбрызгиватель 2–3 раза в неделю. В пасмурную дождливую погоду поливать вообще не нужно. При этом важно следить, чтобы земля не отсыревала, иначе листья загниют.
Прополка и удаление высохших цветов
Засеянный участок нужно пропалывать, чтобы сорняки не забивали росточки. В дальнейшем подросшая клеверная трава сама подавляет сорные растения. Потемневшие цветы обрывают, а если их стало слишком много, газон подстригают.
Стрижка
Первый год посеянный участок не стригут. Это начинают делать со второго года. Полученную зеленую массу можно использовать как корм для животных или мульчировать ею грядки. После стрижки газонная поверхность выглядит неэстетично, но очень быстро восстанавливается.
Некоторые сорта плохо состригаются. Тем, кто не хочет заниматься стрижкой, лучше выбрать низкорослый микроклевер, который вообще не надо стричь.
Удобрение и подкормка
Растения сами выделяют полезный азот, поэтому их не удобряют, кроме случаев, когда культура растет на совсем бедных почвах. В этом случае вносят 0,5 кг суперфосфата и 0,5 кг калийных удобрений на сотку. Подкармливают и растения в холодном климате, поскольку это повышает их морозостойкость. Посевы хорошо откликаются на органическую подкормку, поэтому их можно поливать разведенным навозом.
Решив, когда сеять клевер — осенью или весной, можно ускорить рост культуры, перед посадкой замочив семена в стимуляторе роста «Эпине» или марганцовке и тщательно их просушив. Тогда они подрастут до жары или заморозков.
Размножение растения
Размножается клевер семенами, которые созревают после высыхания цветков. Семечки долго хранятся, если их заложить на хранение сухими и поддерживать нужную влажность в помещении. Трава также размножается корнями.
Болезни и вредители
- Фузариоз — грибковое заболевание, проявляющееся гниением корней. Для лечения применяется 1% суспензия коллоидной серы.
- Ржавчина — вызывается грибком. На листовой поверхности появляются коричневые пятна, которые распространяются по растению, приводя к его гибели. Болезнь лечат смесью извести и молотой серы. Сильно зараженные растения скашивают и сжигают.
- Тифулез — еще одно грибковое заболевание, поражающее не только это растение, но и люцерну. Стебли сохнут и отрываются. Для лечения применяют антигрибковые препараты.
Опасность для культуры представляет и повилика — паразитическое вьющееся растение, которое уничтожают опрыскиванием 60% раствором нитрафена.
Вредителей — личинки жуков-щелкунов, чернотелок, гусениц совок, пыльцеедов, клубеньковых долгоносиков — уничтожают инсектицидами. По отзывам, препараты «Диазинон», «Малатион» и «Фозалон» показывают высокую эффективность в борьбе с этими насекомыми.
Источник
Тендер 147641095 — Поставка конструктора программируемого квадрокоптера «COEX Клевер 4 Code»
- ЗМО Договор Квадрокоптер Лицей Проект.doc 34,36 КБ 17.10.19 13:26
Действующая
- ТЗ.docx 34,64 КБ 17.10.19 13:26
Действующая
- Информация.html 3,31 КБ 17.10.19 13:26
Действующая
Вы не можете просматривать результаты тендеров. Свяжитесь с вашим персональным менеджером, чтобы получить возможность просматривать результаты тендеров
Зарегистрируйтесь и получите полную информацию о Заказчике, аналитику по снижению им цены и основным поставщикам.
Смотреть все лоты тендера
Прямо сейчас вы можете узнать все об этом тендере с помощью модуля «Аналитика»:
Показать больше информации о тендере
Источник
Coex Клевер 4 Pro Сборка
Слушать
Длительность: 5 мин и 17 сек
Битрейт: 192 Kbps
Клевер 2 Сборка Часть 2 Плата Распределения Питания
Coex Clever Drone With 3D Scanner Solution
Стационарный Беспилотный Комплекс Пеликан Автоматика
Квадрокоптер Своими Руками Часть 1 Сборка И Подключение
Доставка Груза На Клевере 4 На Олимпиаде Нти 2019 Clever 4 On Nti Olympics 2019
Клевер 2 Настройка Часть 1 Qground Control Настройка Пульта
Автономные Indoor Полеты Клевера
Сборка Квадрокоптера Клевер 1 Часть
Детский технопарк Кванториум-33
Шоу Дронов В Китае И Южной Корее
Управление Квадрокоптером Клевер 4 С Помощью Эмоций
Конструктор Программируемого Квадрокоптера И Умк Клевер
Клевер 2 Сборка Часть 3 Батарейный Блок
Коптер Экспресс С Кейсом Рой Дронов На Проектной Смене Большие Вызовы В Сириусе
The Difference Between A Drone Flight Controller And Flight Computer
Coex Clover Autonomous Flights Compilation
Идея Стенда Для Изучения Возможностей Полетного Контроллера Coex Pix
Станислав «Stas Sauer» Колмаков
Компетенция Эксплуатация Беспилотных Авиационных Систем
Клевер 2 Настройка Часть 2 Калибровка Датчиков Настройка Полетных Режимов
Квадрокоптер Для Съёмки Из Сантехники Своими Руками
Клевер 2 Настройка Часть 3 Предполетная Подготовка И Полет
8Ы Ŧ 8Ќ Ĝр Χø Pro
Kyrsquare Сколько Бы Не Было Денег
Korg Style Сборник В Дорогу 2020
Эльза И Иккинг Забери Меня С Собой Hiccelsa
Анвар Ахмедов Модар
Like That Eminem
История 5 Класс Вигасин 3 Параграф
Песня Клип Про Сиреноголовый И Cartoon Cat Morgenshtern Элджей
Зелёный Слоник Он Тебя Целует
Саб Зиро И Скорпион
Serhat Durmus Ya
Музыка На Репит
Justin Bieber Friends Slowed Reverb Rain
Coex Клевер 4 Pro Сборка
Песня Луиза Грустная Луиза Грустная
Конструктор Успешная Ферма
Очень Красивая Песня Владимир Песня Верная
Загадки Века Сталин И Гитлер Тайная Встреча
Lut Gaye Ringtone Aankh Uthi Mohabbat Ne Ringtone Jubin Nautiyal New Songs Emraan Hashmi Mr Love Ak
Eelke Kleijn Netherlands Days Like Nights Radio 188 14 06 2021
Deeper Phil Feat Shirley Heavens Misleading Me
Я Русский Солдат Военный Фильм 1995 Г
Momentos Incomodos Entre Jane Rizzoli Y Maura Isles
Аватария Дешевые Наряды Alina Podluzhnaya
Събуди Се 2018 Джоре Дос С Прана Ана
Mcmcc Hillclimb 2014 Onboard With Jay Williams On A Suzuki Rm125
Золотой Прокат Евгении Медведевой На Чемпионате Мира 2017
Bahtiyor Hataev Popuri Бахтиер Хатаев Попури Official Audio Music
Владимир Песня Ты Новинка 2021 Песни О Любви
Pikachu Meme Tweening Test Gachalife Filler
Источник