
Собственно, идея сделать лабораторный блок питания с регулируемым выходным напряжением и током из компьютерного – не нова. В интернете встречается немало вариантов подобных переделок.

Преимущества очевидны:
1. Такие блоки питания буквально «валяются под ногами».
2. Они содержат в себе все основные компоненты, а главное, готовые импульсные трансформаторы.
3. Они имеют превосходные массогабаритные характеристики – подобный трансформаторный блок питания весил бы более 10 кг (этот 1,3 кг всего).
Правда, они не лишены и недостатков:
1. Из-за импульсного преобразования – выходное напряжение содержит богатый спектр высокочастотных помех, что делает их ограниченно применимыми для питания радиостанций.
2. Не позволяют гарантированно получить низкое напряжение на выходе (менее 5 В) при малых токах нагрузки. Это относится только к АТ блокам питания, в которых нет дежурного источника. В ATX напряжение регулируется от 0 В.
И, тем не менее, такой блок питания прекрасно подходит для питания автомобильной электроники в домашних условиях, при проверке и отладке электронных устройств. А наличие режима стабилизации тока позволяет использовать его как универсальное зарядное устройство для большой гаммы аккумуляторов!
Выходное напряжение — от 1 до 20 В
Выходной ток — до 10 А
Масса 1,3 кг
Внимание: это первая статья про переделку блока питания. Читайте также вторую часть!
Для начала, давайте разберёмся, какие блоки питания годятся для переделки. Лучшим образом, для лабораторного блока питания годятся как раз старые блоки питания AT или ATX, собранные на ШИМ-контроллере TL494 (он же: μPC494, μА494, KIA494, AZ494AP, M5T494P, UTC51494, KA7500, AZ7500BP, IR3M02, МВ3759, КР1114ЕУ4 и др. аналогах) мощностью 200 – 250 Вт. Таких встречается большинство! Современные ATX12B, на 350 – 450 Вт, конечно тоже не проблема переделать, но всё же они лучше годятся для блоков питания с фиксированным выходным напряжением (например, 13,8 В).
Для дальнейшего понимания сути переделки, рассмотрим принцип работы блока питания для компьютера.
Более-менее стандартизированные блоки питания (PC/XT, AT, PS/2) для компьютеров появились в начале 80-х годов благодаря компании IBM, и просуществовали до 1996 года. Давайте рассмотрим их принцип действия по структурной схеме:
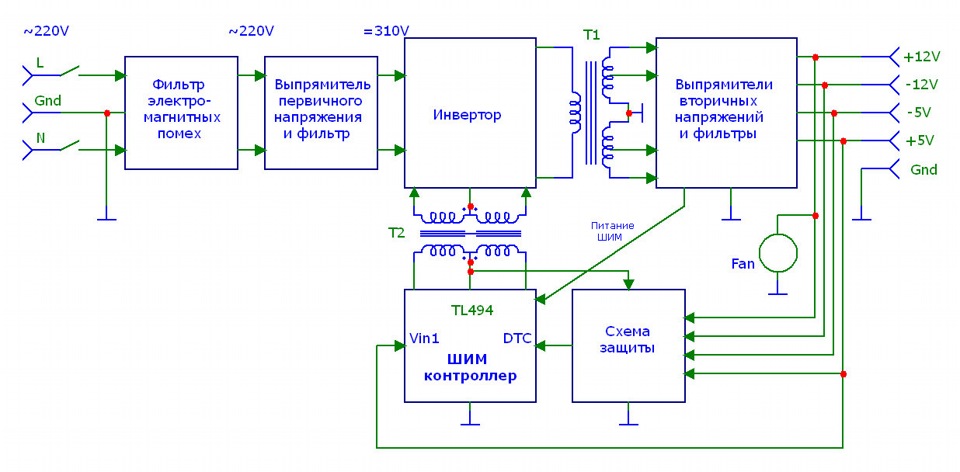
Сетевое напряжение поступает в блок питания через фильтр электромагнитных помех, который препятствует распространению высокочастотных помех от импульсного преобразователя в питающую сеть. За ним следует выпрямитель и сглаживающий фильтр, на выходе которого получаем постоянное напряжение 310 В. Это напряжение поступает на полумостовой инвертор, который преобразует его в прямоугольные импульсы и подаёт на первичную обмотку понижающего трансформатора T1.
Напряжения со вторичных обмоток трансформатора поступают на выпрямители и сглаживающие фильтры. В итоге, на выходе мы получаем необходимые постоянные напряжения.
При подаче питания, в начальный момент, инвертор запускается в режиме автогенерации, а после появления напряжений на вторичных выпрямителях, в работу включатся ШИМ-контроллер (TL494), который синхронизирует работу инвертора, подавая запускающие импульсы в базы ключевых транзисторов через развязывающий трансформатор T2.
В блоке питания используется широтно-импульсное регулирование выходного напряжения. Для увеличения напряжения на выходе, контроллер увеличивает длительность (ширину) импульсов запуска, а для уменьшения – уменьшает.
Стабилизация выходного напряжения в таких блоках питания часто осуществляется только по одному выходному напряжению (+5 В, как самому важному), иногда по двум (+5 и +12), но с приоритетом +5 В. Для этого, на вход компаратора контроллера (вывод 1 TL494, через делитель) поступает выходное напряжение. Контроллер подстраивает ширину импульсов запуска, для поддержания этого напряжения на необходимом уровне.
Также, блок питания имеет систему защиты 2 видов. Первую – от превышения суммарной мощности и короткого замыкания, и вторую, от перенапряжения на выходах. В случае перегрузки, схема останавливает работу генератора импульсов в ШИМ-контроллере (подавая +5 В на вывод 4 TL494).
Кроме того, блок питания содержит узел (на схеме не показан), формирующий на выходе сигнал POWER_GOOD («напряжения в норме»), после выхода блока питания на рабочий режим, разрешающий запуск процессора в компьютере.
Блок питания AT (PC/XT, PS/2) имеет всего 12 основных проводов для подключения к материнской плате (2 разъёма по 6 контактов). В 1995 году компания Intel с ужасом обнаружила, что существующие блоки питания не справляются с возросшей нагрузкой, и ввела стандарт на 20-ти/24-контактный разъём. Кроме того, мощности стабилизатора +3,3 В на материнской плате для питания процессора также перестало хватать, и его перенесли в блок питания. Ну и Microsoft, ввела в операционную систему Windows, режимы управления питанием Advanced Power Management (APM)… Так, в 1996 году появился современный блок питания ATX.</cut>
Рассмотрим отличия блока питания ATX от старых AT по его структурной схеме:
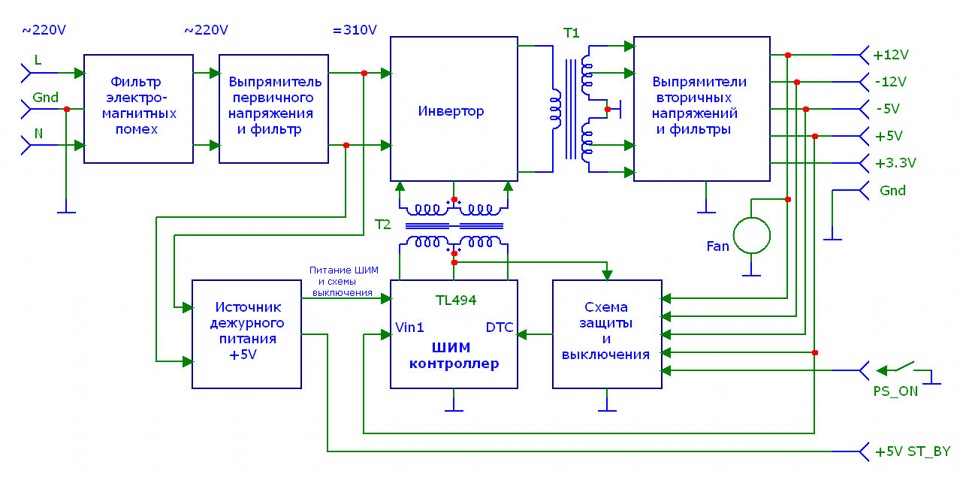
Режим Advanced Power Management (APM) потребовал отказаться от сетевого выключателя и ввести в блок питания второй импульсный преобразователь – источник дежурного напряжения +5 В. Этот маломощный блок питания работает всегда, когда сетевая вилка включена в сеть. Первичное напряжение на него поступает от того же выпрямителя и фильтра, что и на основной инвертор.
Кроме того, питание на ШИМ-контроллер в ATX поступает от этого же дежурного источника (не стабилизированные 12 — 22 В), а автозапуск инвертора отсутствует. Поэтому, блок питания стартует только при наличии импульсов запуска от контроллера. Включение основного блока питания осуществляется включением генератора импульсов ШИМ-контроллера сигналом PS_ON (замыканием его на массу) через схему защиты.
При переделке БП ATX, источник дежурного напряжения нужно сохранить. Во-первых, он будет питать достаточным напряжением ШИМ-контроллер при установке на выходе основного выпрямителя очень низкого напряжения (вплоть до 0 В). Во-вторых, от него можно запитать вентилятор, через 12 В стабилизатор. Характерные особенности переделки именно ATX БП изложены во второй части статьи.
Вот, и все основные отличия.
Как выбрать блок питания для переделки?
Как известно, блоки питания изготавливаются в Китае. А это может повлечь за собой отсутствие некоторых компонентов, которые они сочли «лишними»:
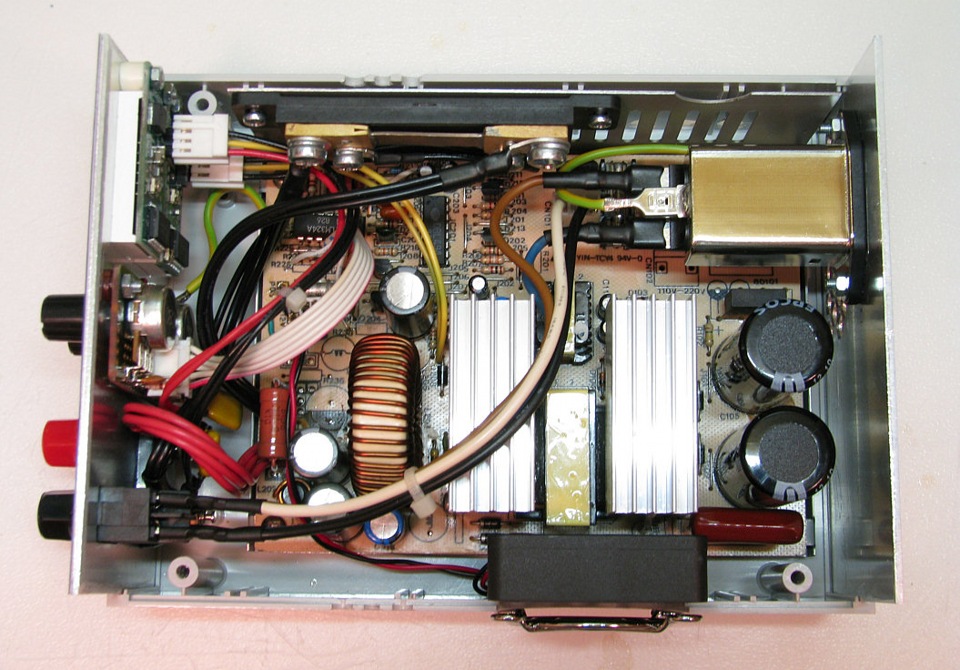
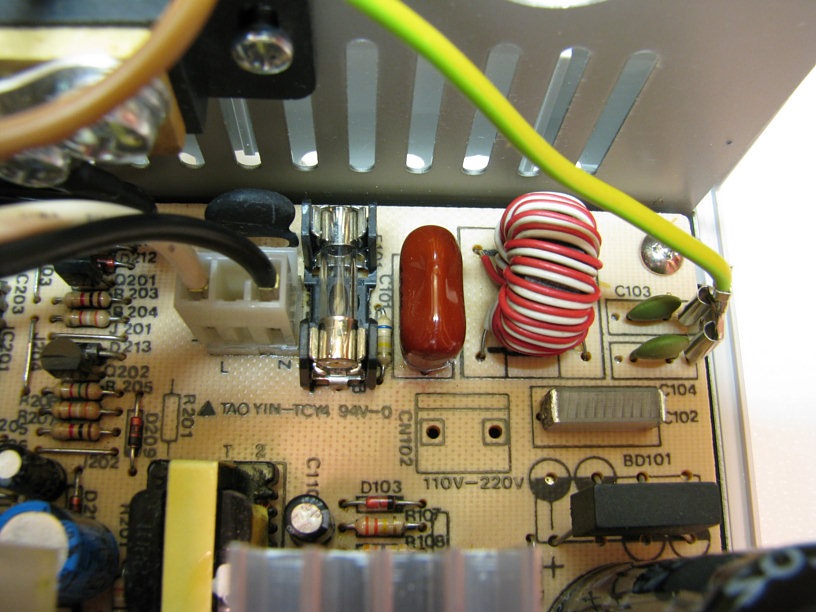
1. На входе может отсутствовать фильтр электромагнитных помех. Самое главное в фильтре – это дроссель, намотанный на ферритовом кольце. Обычно, его прекрасно видно сквозь лопасти вентилятора. Вместо него могут оказаться проволочные перемычки. Наличие фильтра – косвенный признак качественного блока питания!
2. Также, нужно посмотреть на размер понижающего трансформатора (тот который побольше). От него зависит максимальная мощность блока питания. Высота его должна быть не менее 3 см. Встречаются блоки питания с трансформатором высотой менее 2 см. Мощность таких 75 Вт, даже если написано 200.
3. Для проверки работоспособности блока питания подключите к нему нагрузку. Я использую автомобильные лампы фар мощностью 50 – 55 Вт напряжением 12 В. Обязательно одну подсоедините к цепи +5 В (красный провод), а вторую, к цепи +12 В (жёлтый провод). Включите блок питания. Отсоедините разъём вентилятора (или, если на нём сэкономили китайцы, просто остановите рукой). Блок питания не должен пищать.
Спустя минуту отключите его от сети и пощупайте рукой температуру радиаторов и дросселя групповой фильтрации в фильтре вторичных напряжений. Дроссель должен быть холодный, а радиаторы тёплыми, но не раскалёнными!
Я использовал блок питания 1994 года выпуска мощностью 230 Вт – тогда ещё не экономили.
Переделка блока питания
Начать нужно с чистки блока питания от пыли. Для этого отсоедините (отпаяйте) от платы сетевые провода и провода к переключателю 110/220 – он нам больше не понадобится, т.к. в положении 220 В выключатель разомкнут. Выньте плату из корпуса. Пылесос, жёсткая кисточка, и вперёд!
Далее, нужно попытаться найти электрическую принципиальную схему вашего блока питания, или хотя бы максимально на неё похожую (отличаются они не существенно). Она вам поможет ориентироваться в номиналах «отсутствующих» компонентов. Рекомендую искать здесь. Я не исключаю, что, как и мне, вам придётся некоторые узлы срисовывать с платы.
Далее нужно выполнить несколько общих модификаций по установке недостающих частей и умощнению цепей первичного напряжения и инвертора. Рассмотрим на примере электрической схемы моего блока питания.
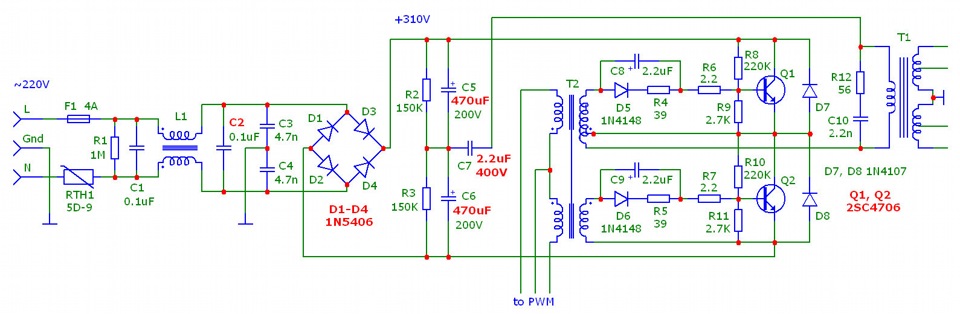
Номиналы заменяемых компонентов на схеме выделены красным цветом. У вновь устанавливаемых компонентов, красным цветом выделены позиционные обозначения.
1. Проверьте наличие всех конденсаторов и дросселя в фильтре электромагнитных помех. При отсутствии – установите их (у меня отсутствовал только C2). Я также установил второй, дополнительный фильтр помех, выполненный в виде гнезда для подключения сетевого шнура.
2. Посмотрите типы используемых диодов в выпрямителе (D1 – D4). Если там стоят диоды с током до 1 А (например, 1N4007) – замените их минимум на 2-х амперные, или установите диодный мост. У меня стоял 2-х амперный мост.
3. В подавляющем большинстве блоков питания в фильтре первичного напряжения установлены конденсаторы ёмкостью не более 200 мкФ (С5 – С6). Для отдачи полной мощности, замените их конденсаторами ёмкостью 470 – 680 мкФ, подходящими по размерам, напряжением не менее 200 В. Предпочтение следует отдавать группе 105°C.
4. Транзисторы в полумостовом инверторе (Q1, Q2) могут быть самые разнообразные. В принципе, большинство из них греется не криминально. Для снижения нагрева, их можно заменить на более мощные – например, 2SC4706, установив их на радиатор, через изолирующие прокладки. Я пошёл ещё дальше и заменил оба радиатора на более эффективные.
5. В процессе испытания блока питания под максимальной нагрузкой, у меня нагрелся и лопнул конденсатор С7 (обычно это 1 мкФ 250 В). Этот конденсатор не должен греться вообще. Я думаю, он был неисправен, но заменил его всё же на 2,2 мкФ 400 В.
Теперь рассмотрим структурную схему переделанного блока питания:
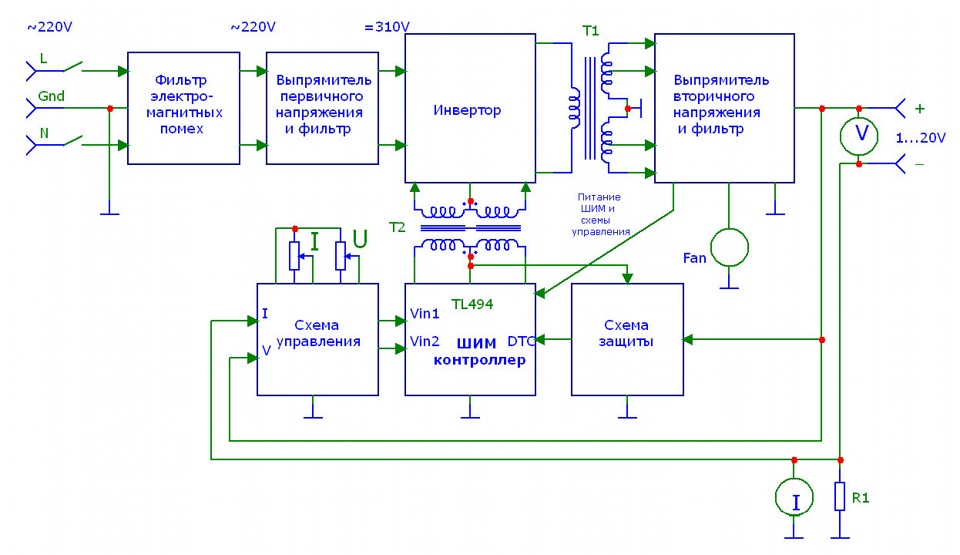
Для модификации нам потребуется удалить все вторичные выпрямители, кроме одного (правда, заменив в нём почти все компоненты), удалить схему PS_ON (что бы БП ключался автоматически), переделать схему защиты, добавить схему управления, шунт (R1, входит в состав амперметра) и измерительные приборы. Элементы схемы POWER_GOOG тоже можно удалить. Теперь подробнее.
Для снятия выходного напряжения используется 12-ти вольтовая обмотка понижающего трансформатора T1. В наиболее мощных и качественных БП, цепи выпрямителя и фильтра +12 В уже имеют второй дроссель и достаточно места для установки электролитических конденсаторов. Но если в цепи фильтра +12 В нет второго дросселя, то лучший вариант — монтировать всё на месте 5-ти вольтового, а затем, перекинуть на него выводы обмотки 12 В. Ниже я опишу именно второй вариант.
Выпрямитель вторичных напряжений и фильтр, после переделки должны выглядеть следующим образом:
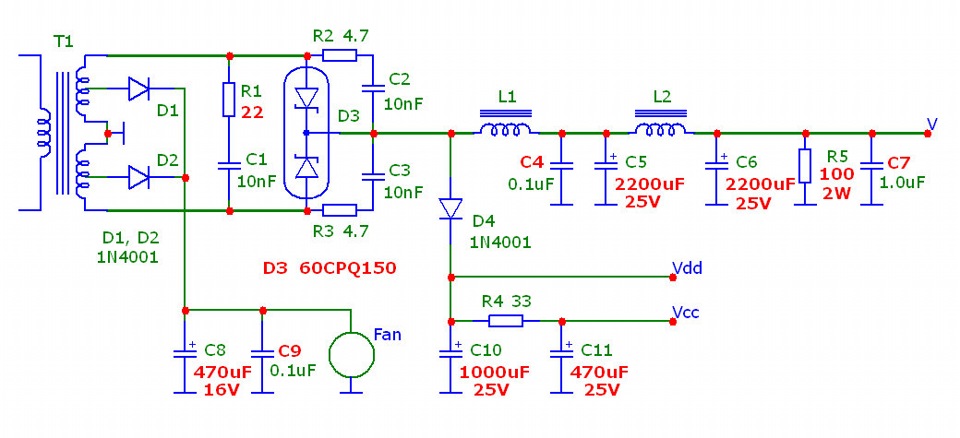
1. Выпаяйте все элементы выпрямителей и фильтров +5, +12 и -12 В. За исключением демпферных цепочек R1, C1, R2, С2 и R3, C3 и дросселя L2. Впоследствии, при выходном напряжении порядка 20 В я заметил нагрев резистора R1 и заменил его на 22 Ом.
2. Отрежьте дорожки, ведущие от 5-ти вольтовых отводов обмотки трансформатора T1 к диодной сборке выпрямителя +5 В, сохранив при этом её соединение с диодами выпрямителя –5 В (он нам ещё понадобится).
3. На месте диодной сборки выпрямителя +5 В (D3) установите сборку на диодах Шоттки на ток 2х30 А и обратное напряжение не менее 100 В, например, 63CPQ100, 60CPQ150. (Штатная 5-ти вольтовая сборка диодов имеет обратное напряжение всего 40 В, а штатные диоды в выпрямителе 12 В рассчитаны на слишком слабый ток – их использовать нельзя.) Эта сборка практически не греется при работе.
4. Соедините толстыми проволочными перемычками выводы 12-ти вольтовой обмотки с установленной диодной сборкой. Демпферные цепи R1, C1, подключенные к этой обмотке, сохранены.
5. В фильтре, вместо штатных, установите электролитические конденсаторы (C5, C6) ёмкостью 1000 – 2200 мкФ на напряжение не менее 25 В. А также добавьте керамические конденсаторы C4 и C7. Установите вместо штатного, нагрузочный резистор 100 Ом, мощностью 2 Вт.
6. Если в процессе проверки блока питания под нагрузкой, дроссель групповой фильтрации (L1) не нагревался, то его достаточно перемотать. Смотайте с него все обмотки, считая витки. (Обычно, 5 В обмотки содержат 10 витков, а 12 В – 20 витков.) Намотайте новую обмотку двумя проводами, сложенными вместе диаметром 1,0 – 1,3 мм (аналогично штатной 5-ти вольтовой) и числом витков 25-27. Если в процессе работы будет греться, то увеличьте число витков до 50-ти.
Если же дроссель грелся, то его сердечник испорчен (есть такая проблема у порошкового железа – «спекается») то придётся искать новый сердечник из порошкового железа (не ферритовый!). Мне пришлось купить кольцевой сердечник белого цвета чуть большего диаметра и намотать новую обмотку. Вообще не греется.
7. Дроссель L2 остаётся штатный, от 5-ти вольтового фильтра (обычно это несколько витков на ферритовом стержне).
8. Для питания вентилятора в БП AT используется 5-ти вольтовая обмотка, и разводка выпрямителя –5 В, которую переделываем в +12. Диоды используются штатные, от выпрямителя –5 В (D1, D2), их необходимо запаять обратной полярностью. Дроссель уже не нужен – запаяйте перемычку. А на место штатного конденсатора фильтра, установите конденсатор ёмкостью 470 мкФ 16 В, естественно, обратной полярностью. Бросьте перемычку от выхода фильтра (бывш. –5 В), к разъёму вентилятора. Непосредственно около разъёма, установите керамический конденсатор C9. Напряжение на вентиляторе у меня составляет +11,8 В, при малых токах нагрузки оно снижается.
Это самый простой способ получить «стабильные» +12 В в регулируемом БП AT для вентилятора. Если же вы переделываете БП ATX то используйте для питания вентилятора напряжение (12-22 В) дежурного источника напряжения, включив вентилятор, если требуется, через стабилизатор 12 В, например 7812. Только увеличьте ёмкости конденсаторов в этом источнике раз в 10. Подробнее этот вопрос изложен во второй части статьи.
Если в вашем БП вентилятор получал питание от схемы управления по температуре, то лучше сохранить её. Это уменьшит шум от работы БП при малых нагрузках.
9. В цепи питания ШИМ-контроллера (Vcc), необходимо увеличить ёмкости конденсаторов фильтров C10 и C11. Напряжение с конденсатора C10 (Vdd) используется для питания цифровых амперметра и вольтметра.
Если вы переделываете БП ATX, в котором имеется источник дежурного напряжения (+5V_SB), – сохраните его! В штатной схеме он используется как второй (параллельный) источник питания для ШИМ-контроллера (развязанный через диод). Это позволит сохранять высокое напряжение питания ШИМ, даже при низком напряжении на выходе блока питания (основного выпрямителя). Подробнее этот вопрос изложен во второй части статьи.
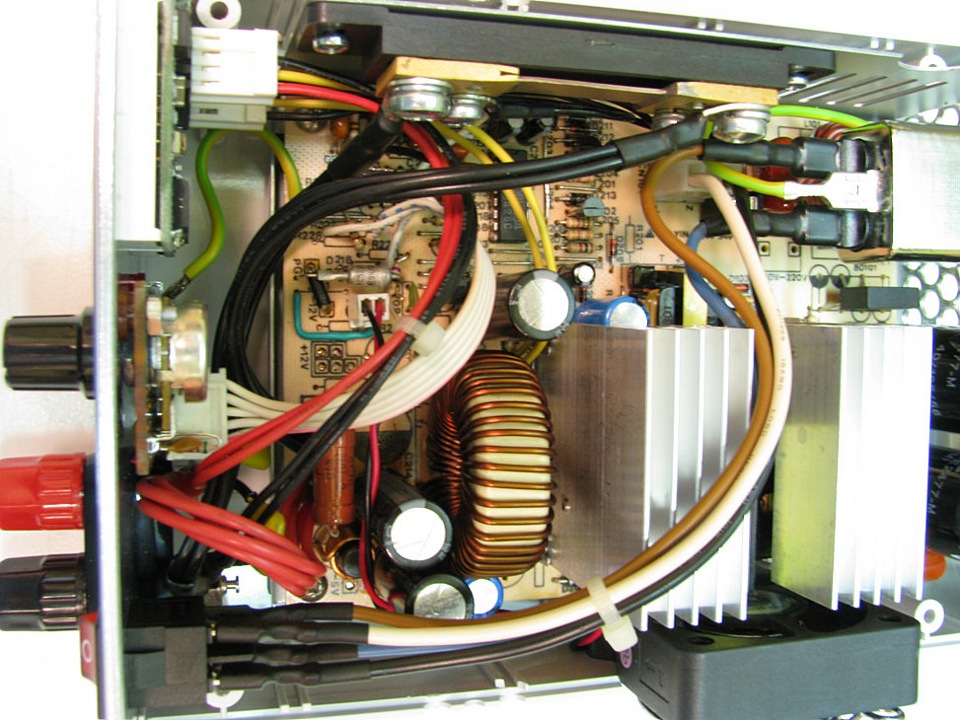
Схема защиты по превышению суммарной мощности остаётся без изменений. Вообще, в блоках питания встречается великое множество вариантов реализации схем защиты по превышению мощности. Не пытайтесь её переделать по этой схеме! Я лишь показал на примере схемы защиты своего БП. Сохраните вашу родную, добавив неё цепочку защиты от перенапряжения.
Изменяется только схема защиты от перенапряжения на выходе. Вот, окончательная схема:
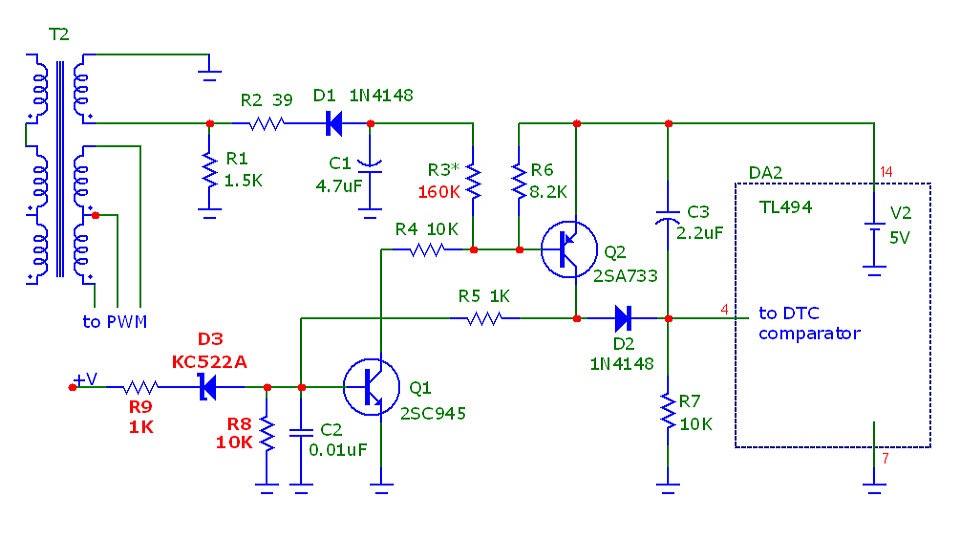
При увеличении нагрузки на инверторе свыше допустимой, увеличивается ширина импульсов на обмотке связи развязывающего трансформатора T2. Диод D1 детектирует их, и на конденсаторе C1 увеличивается отрицательное напряжение. Достигнув определённого уровня (примерно –11 В), оно открывает транзистор Q2 через резистор R3. Напряжение +5 В через открытый транзистор поступит на вывод 4 контроллера, и остановит работу его генератора импульсов. В вашем блоке питания такая защита может быть организована иначе.
Из схемы выпаиваются все диоды и резисторы, подходящие от вторичных выпрямителей к базе Q1, и устанавливается стабилитрон D3 на напряжение 22 В, например, КС522А, и резисторы R8, R9.
В случае аварийного увеличения напряжения на выходе блока питания выше 22 В, стабилитрон «пробьётся» и откроет транзистор Q1. Тот в свою очередь откроет транзистор Q2, через который на вывод 4 контроллера поступит напряжение +5 В, и остановит работу его генератора импульсов.
Осталось собрать схему управления, и подключить её к ШИМ-контроллеру.
Схема управления представляет собой два усилителя (тока и напряжения), которые подключаются к штатным входам компараторов ошибки контроллера. Их у него 2 (выводы 1 и 16 TL494) и работают они по ИЛИ. Это и позволяет получить как стабилизацию напряжения, так и тока. Окончательная схема блока управления:
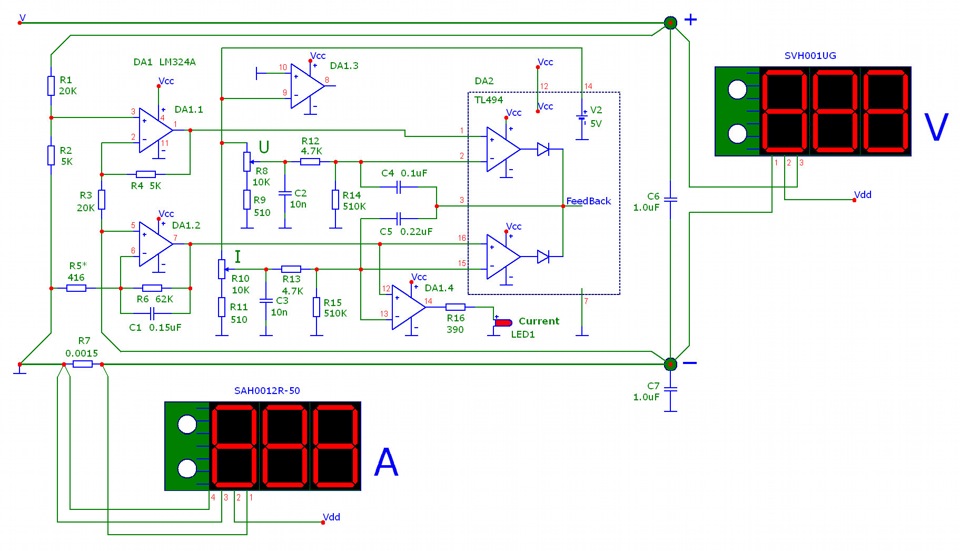
На операционном усилителе DA1.1 собран дифференциальный усилитель в цепи измерения напряжения. Коэффициент усиления подобран таким образом, что при изменении выходного напряжения блока питания от 0 до 20 В (с учётом падения напряжения на шунте R7), на его выходе сигнал меняется в пределах 0…5 В. Коэффициент усиления зависит от соотношения сопротивлений резисторов R2/R1=R4/R3.
Обратите внимание: для корректного измерения напряжения, резисторы R1 и R3 подключены отдельными тонкими проводами непосредственно к присоединительным клеммам выходного напряжения.
На операционном усилителе DA1.2 собран усилитель в цепи измерения тока. Он усиливает величину падения напряжения на шунте R7. Коэффициент усиления подобран таким образом, что при изменении тока нагрузки блока питания от 0 до 10 А, на его выходе сигнал меняется в пределах 0…5 В. Коэффициент усиления зависит от соотношения сопротивлений резисторов R6/R5.
В качестве датчика тока (R7) я использовал стандартный измерительный шунт от встроенного амперметра 75ШИП1500.5 с довольно низким сопротивлением – 1,5 миллиОма. Поэтому, в цепь измерения я включил ещё и соединительные провода, которыми присоединяется шунт. Это позволило отказаться от дифференциального усилителя и снизить количество проводов. Резистор R5 подключен непосредственно к общему проводу вблизи операционного усилителя, а неинвертирующий вход (вывод 5) подключен к тому же проводу (от R3), идущему к отрицательной клемме.
Порядок действий следующий: сначала находите подходящий амперметр с собственным шунтом (внешним или внутреним), и его же используете в качестве измерительного шунта R7 схемы управления. Сопротивление шунта не важно – пределы регулировки тока потом можно выставить практически под любой шунт, изменением сопротивления R5 (и, при необходимости, – R6) в схеме управления, таким образом, чтобы максимальный предел регулировки стабилизации тока соответствовал 10 А. (Не пугайтесь, с некоторыми шунтами номиналы R5 и R6 получались 1,8 кОм и 30 кОм, соответственно.)
Сигналы с обоих усилителей (напряжения и тока) подаются на входы компараторов ошибки ШИМ-контроллера (выводы 1 и 16 DA2). Для установки необходимых значений напряжения и тока, инвертирующие входы этих компараторов (выводы 2 и 15 DA2) подключены к регулируемым делителям опорного напряжения (переменные резисторы R8, R10). Напряжение +5 В для этих делителей снимается с внутреннего источника опорного напряжения ШИМ-контроллера (вывод 14 DA2).
Резисторы R9, R11 ограничивают нижний порог регулировки. Конденсаторы C2, C3 устраняют возможный «шум» при повороте движка переменного резистора. Резисторы R14, R15 также установлены на случай «обрыва» движка переменного резистора.
На операционном усилителе DA1.4 собран компаратор для индикации перехода блока питания в режим стабилизации тока (LED1).
В схеме я использовал счетверённый операционный усилитель LM324A, но можно использовать и другие, работающие в широком диапазоне питающих напряжений, например, LM2902, KIA324, AN6564, HA17324, KA2504, TLE2024, К1401УД2 (у отечественного выводы питания расположены зеркально!), или использовать два сдвоенных – LM358, LM2904, MC4558, AN6561, HA17904, TLE2022, К1040УД1. Питание на него (Vcc) подаётся от цепи питания ШИМ-контроллера (от вывода 12 DA2) которое варьируется в пределах 5…25 В, в зависимости от выходного напряжения блока питания.
Несколько улучшенный вариант блока управления приведён во второй части статьи.
Элементы регулировки R8 – R11, а также конденсаторы C2 и C3 расположены на небольшой отдельной плате, привинченной к передней панели блока питания. Все остальные элементы схемы расположены на свободном месте печатной платы блока питания. Если места на плате нет, то схему управления можно собрать на отдельной плате. Скачать печатную плату можно здесь.
Для подключения усилителей к ШИМ-контроллеру (DA2), нужно предварительно отпаять от него все штатные компоненты, идущие к выводам 1, 2, 3, 15 и 16. Конденсаторы C4 и C5 расположены в непосредственной близости от TL494 (по сути, в штатных местах).
Для измерения и отображения выходного напряжения и тока я использовал готовые цифровые вольтметр и амперметр, подключенные по схеме согласно прилагаемой к ним инструкции. Питание на них подаётся с конденсатора C10 (см. схему вторичных выпрямителей). Если в вашем распоряжении окажется блок питания ATX с источником дежурного питания, то питание на измерители (Vdd) подавайте от этого источника – он имеет выход нестабилизированного напряжения +12…+22 В.
Для подключения этих приборов удобно использовать разъёмы для Floppy дисководов, имеющиеся на штатных проводах блока питания AT.
Обратите внимание, что измерительные выводы вольтметра присоединяются отдельными тонкими проводами непосредственно к выходным клеммам блока питания. А измерительные выводы амперметра – непосредственно к измерительным контактам шунта. Это отображено на схеме.
Часть штатного металлического корпуса (дно и боковая стенка) блока питания в моей конструкции выполняет роль шасси для платы и для шунта.
Для снижения уровня высокочастотных помех, непосредственно на выходных клеммах расположены керамические конденсаторы ёмкостью 1 мкФ (C6, C7 на схеме блока управления).</cut>
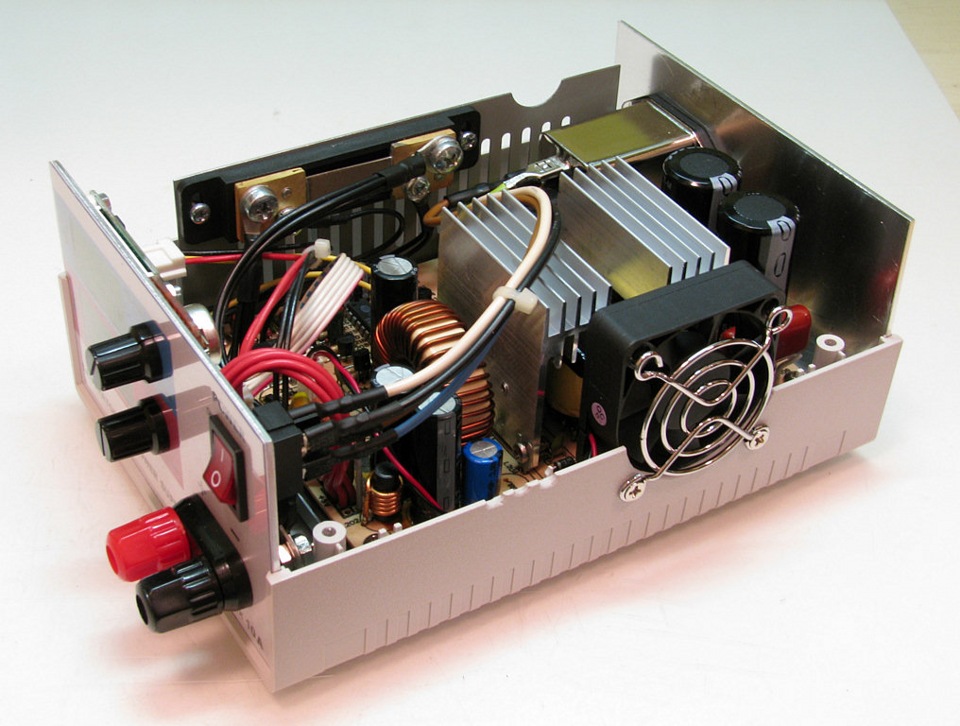
Для своего блока питания я использовал готовый корпус с ручкой для переноски. Для охлаждения используется вентилятор Ø50 мм. Он гонит воздух внутрь корпуса. Для этого в корпусе было вырезано необходимое отверстие напротив радиаторов, а на противоположной стороне и задней стенке, высверлены отверстия для выхода воздуха. Идея оформления зависит только от вашего вкуса.

Если вы намереваетесь использовать такой блок питания для радиостанций, то я настоятельно рекомендую сохранить в конструкции штатный металлический корпус – он отлично экранирует и снижает уровень электромагнитных помех, излучаемых инвертором.
Внимание: это первая статья про переделку блока питания. Читайте также вторую часть статьи, где я привожу дополнительные рекомендации попеределки БП ATX и усовершенствованную схему управления..


Время на прочтение10 мин
Количество просмотров418K
Всем привет!
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.

Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf

Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
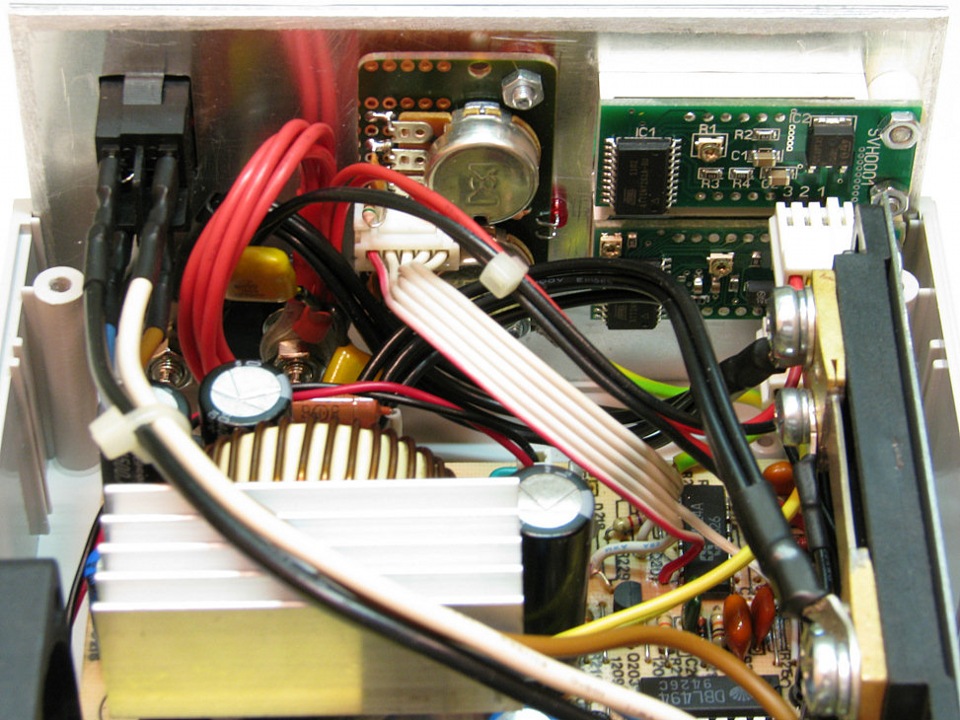
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:

Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:

Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.

Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:

Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
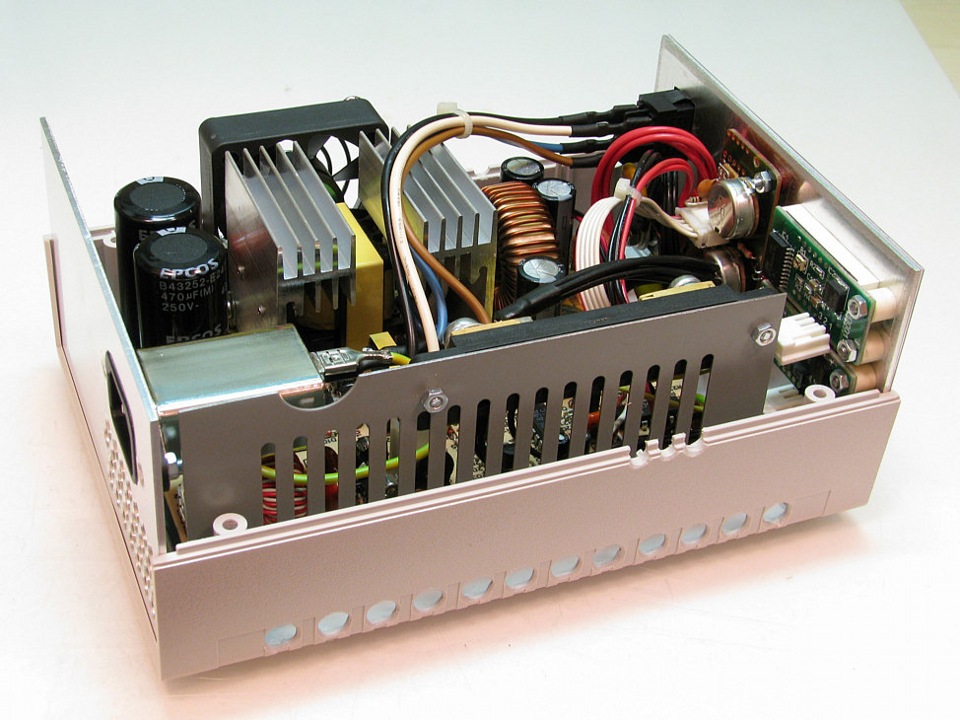
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.

Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
Ну вот, наконец-то осуществил давнюю мечту — переделал свой первый компьютерный БП ATX (Codegen 300W P4) в регулируемый по общеизвестной схеме «итальянца». А поскольку эта тема, причем с точно таким же БП, на форуме поднималась не раз, решил поделиться своим вариантом переделки с прилагающейся схемой. Авось кому пригодится.

В сети полно информации по переделке БП по данной схеме, поэтому в подробности вдаваться не буду. После переделки, то есть выпаивания всего лишнего и добавления элементов, отмеченных на схеме красным цветом, блок заработал сразу. Минимальное выходное напряжение вышло 1В, максимальное ограничил на уровне 21В. Минимальный ток ограничения — 0,1А, максимальный — 11А. Сторонние шумы при регулировании по максимуму убрал подбором конденсаторов, отмеченных на схеме * «звездочкой». Стабилизация по току работает тихо, по напряжению все равно остался небольшой писк, зависящий от нагрузки. Силовые диоды выбирал именно такие по личным соображениям. Можна ставить ультрафасты или Шоттки. В случае Шоттки минимальное выходное напряжение будет на порядок выше. Можна собрать полный мост, тогда выходное напряжение увеличится в 2 раза. Шунт собрал из двух запараллеленных керамических резисторов 0,1 Ом, 5Вт. В разрыв цепи «масса — корпус» установил защитный резистор 510 Ом, 2Вт, чтоб с одной стороны сохранить экран и в то же время предотвратить возможные случайные КЗ на оголенный корпус.
Учитывая конструктивную особенность китайского ампервольтметра — спаренные выводы «I-» и «GND», что исключает возможность подключения последнего к общей массе, пришлось для цепи питания делать гальваническую развязку с помощью трансформатора Т4, подключенного к выводу 5В трансформатора дежурки Т3. Трансформатор сделал из дросселя нерабочей «экономки», намотав первичную обмотку L1 — 25 вит. проводом ПЭВ-2, 0,45 мм, вторичную L2 — 85 вит. проводом ПЭВ-2, 0,25 мм. Ампервольтметр потребляет мизер, поэтому марки и диаметры обмоточных проводов не критичны. Напряжение питания вышло 16В. Вместо предоставленной схемы питания ампервольтметра можно установить отдельный БП. Кулер запитал от вывода питания ШИМ дежурки через ограничительный резистор, который нужно подобрать.
Схема «итальянца» довольно простая и легкая в повторении, но имеет существенный недостаток — при обрыве цепи любого из регулировочных резисторов на выходе будут максимальные параметры БП, что может быть весьма чревато для многих подключаемых схем.
Дебютный БП собирал на скорую руку, в большей степени как учебное пособие, поэтому на приз зрительских симпатий не претендую, а эстетов, педантов и перфекционистов прошу вести себя скромно и сдержанно )))))
Успехов всем в жизни и творчестве.
Сегодня стоимость лабораторного блока питания составляет примерно 10 тыс. рублей. Но, оказывается, есть вариант переделки компьютерного блока питания в лабораторный. Всего за тысячу рублей вы получаете защиту от короткого замыкания, охлаждение, защиту от перегрузки и несколько линий напряжения: 3В, 5В и 12В. Однако мы будем модифицировать его, чтобы получить диапазон от 1,5 до 24В, который идеально подойдет для большинства электроники.

Я считаю, что этот способ переделки компьютерного блока питания на 24 вольта лучший, учитывая, что я смог воплотить его в реальность своими руками всего в 14 лет.
ПРЕДУПРЕЖДЕНИЕ: Здесь ведется работа с током, будьте осторожны и соблюдайте меры безопасности!
Вам понадобится:
- рулетка
- отвертка
- Компьютерный блок питания (рекомендую 250 Вт +) и кабель для него
- Проволочные защелки
- Паяльник
- Резистор на 10Ом 10Вт или больше (некоторые новые блоки питания не работают должным образом без нагрузки, поэтому резистор должен её обеспечить)
Необязательно:
- переключатель
- 2 светодиода любого цвета (красный и зеленый подойдут лучше всего)
- Если вы используете светодиоды, понадобится 1 или 2 резистора на 330 Ом,
- Термоусадка
- Внешний корпус (можно поместить всё в оригинальный корпус, а можно взять другой).
В зависимости от того, какой метод для регулируемого блока питания из БП компьютера вы используете (подробнее об этом позже):
- Клеммные колодки
- Дрель
- Регулятор напряжения LM317 или LM338K
- Конденсаторы 100nF (керамика или тантал)
- Конденсаторы 1uF Электролитические
- Силовой диод 1N4001 или 1N4002
- Резистор 120 Ом
- Переменный резистор 5 кОм
- Разъемы
- Зажимы «крокодил»
Шаг 1: Сбор и подготовка блока питания
Предупреждение: ПЕРЕД ТЕМ, КАК НАЧАТЬ, УБЕДИТЕСЬ, ЧТО БЛОК ПИТАНИЯ НЕ ПОДКЛЮЧЕН
Конденсаторы могут ударить током, что довольно больно. Дайте блоку питания полежать в течение нескольких дней, чтобы он разрядился, или подключите резистор на 10 Ом к красному и черному проводу.
Если вы слышите жужжание при включении питания, это означает, что где-то происходит короткое замыкание или другая серьезная проблема. Если вы слышите жужжание (не от паяльника) во время пайки, это означает, что блок питания подключен. Помните, что если блок, который подключен к питанию, отключить кнопкой, в нем все еще останется ток.
Хорошо, давайте вынем блок питания из компьютера. Обычно он крепится на 4 винтах к задней панели корпуса. Выньте провода из отверстия, затем сгруппируйте их по цветам и отрежьте концы.
Кстати, вы только что аннулировали свою гарантию.
Шаг 2: Делаем проводку
Теперь приступим к сложной части, где нужно добавить светодиоды, переключатели и другие подобные детали. Мы имеем много проводов каждого типа, поэтому я рекомендую использовать 2-4 провода. Некоторые люди перебирают все внутри коробки, а я сделал всё снаружи. Это зависит от того, какой метод вы используете на следующем шаге.
Если вы хотите добавить индикатор ожидания или индикатор включения питания, вам понадобится светодиод (рекомендую красный, но не обязательно) и резистор на 330 Ом. Припаяйте черный провод к одному концу резистора, а короткий конец светодиода — к другому. Резистор уменьшит напряжение, чтобы не повредить светодиод. Перед пайкой, наденьте небольшой кусок термоусадки, чтобы защитить контакты от короткого замыкания. Припаяйте фиолетовый провод к более длинной ноге, и когда вы подадите питание (не включая блок), светодиод должен загореться.
Для включенного блока питания вы также можете установить другой светодиод (рекомендую зеленый). Некоторые говорят, что нужно использовать серый провод для питания светодиода, но тогда нужен еще один резистор на 330 Ом. Я просто подключил его к оранжевому проводу 3,3 В.
Если вы используете метод с серым проводом:
Прежде чем припаять его, наденьте еще один кусочек термоусадки, чтобы предотвратить КЗ. Припаяйте серый провод к одному концу резистора, а другой конец резистора — к более длинной ножке светодиода. Черный провод припаяйте к короткой ножке.
При использовании оранжевого провода 3.3В:
Прежде чем припаять его, наденьте еще один кусочек термоусадки, чтобы предотвратить КЗ. Припаяйте оранжевый провод к более длинной ножке светодиода, а черный провод — к более короткой ножке.
Теперь к переключателю: если на задней стенке вашего блока питания уже есть переключатель, этот пункт вам не сильно пригодится. Подключите зеленый провод к одному контакту на переключателе, а черный — к другому. Если вы не хотите использовать переключатель, просто соедините зеленый и черный провода.
Вы также можете использовать предохранитель на 1А. Всё, что нужно сделать, это обрезать черные провода примерно в середине, и соединить их с предохранителем в держателе.
Некоторым блокам питания нужна нагрузка для правильной работы. Для обеспечения этой нагрузки припаяйте красный провод к одному концу резистора 10 Ом\10 Вт и черный провод к другому. Таким образом блок будет думать, что он что-то делает.
Если вы ничего не поняли, загляните в схему, которую я приложил. В ней показан способ подключения проводов. Об этом я расскажу в следующем шаге. Там изображен способ с серым проводом на светодиод (но вы можете использовать оранжевый, как написано выше), а также показывает проводку для высокоомного резистора.
Шаг 3: Пускаем ток!
В учебных пособиях, которые я прочитал, существует множество различных способов подключения разъемов для подключения ваших устройств к питанию. Мы начнем с самого лучшего и дойдем до худшего.
Некоторые учебные пособия расскажут вам, как собрать все детали внутри корпуса, но это опасно и приведет к чрезмерному нагреву и поломкам. Я рекомендую использовать внешний монтаж.
Добавление переменного резистора
Я лично считаю, что это лучший метод, так как он может обеспечить любое напряжение от 1,5 до 24 В. Причина того, что он на 22В, а не 12В, потому что он использует синий провод, который имеет напряжение -12 В, а не обычную землю (черный провод).
Нам понадобится:
- Регулятор напряжения LM317 или LM338K
- Конденсаторы 100nF (керамика или тантал)
- Конденсаторы 1uF Электролитические
- Силовой диод 1N4001 или 1N4002
- Резистор 120 Ом
- Переменный резистор 5 кОм
Сначала постройте схему с основного изображения и соедините ваши линии +12 и -12 В. Затем просверлите отверстия в блоке питания или в внешнем корпусе, чтобы установить переменный резистор. Все остальные детали должны находиться внутри. Теперь я предлагаю добавить две клеммных колодки, чтобы вы могли подключать устройства напрямую. Также можно подключить к ним «крокодилы». Когда вы поворачиваете переменный резистор, напряжение должно находиться в диапазоне от 1,5 до 24 В.
ПРИМЕЧАНИЕ. На главном изображении есть опечатка, которую следует учесть: + 24В вместо 22В. Если у вас есть старый вольтметр, вы можете подключить его в цепь, чтобы отслеживать выходящее напряжение.
Разъемы
Теперь нужно установить разъемы для подключения оборудования. Просверлите для них отверстия (обязательно оберните печатную плату в пластик, так как металлические осколки могут закоротить ее), а затем проверьте, подходят ли они по размеру, вставив разъемы и затянув болт. Выберите, какое напряжение должно идти на каждый разъем и сколько разъемов нужно вставить. Обозначения проводов по цветам:
- Красный: + 5В
- Желтый: + 12В
- Оранжевый: + 3,3В
- Черный: Земля
- Белый: -5В
Выше приведено изображение с использованием метода с разъемами.
Крокодиловые зажимы
Если у вас не так много опыта или у вас нет вышеуказанных деталей, и по какой-то причине вы не можете их купить, вы можете просто подключить любые линии напряжения, которые вы хотите к крокодиловым зажимам. Если вы выбрали этот вариант, я рекомендую использовать изоляцию, чтобы предотвратить КЗ.
Советы и устранение неполадок
- Не бойтесь добавлять ингредиенты в коробку: светодиоды, наклейки и т.д.
- Убедитесь, что вы используете блок питания ATX. Если это AT или более старый источник питания, у него, скорее всего, будет другая цветовая схема для проводов. Если у вас нет данных о проводке, даже не начинайте никаких работ, иначе вы просто сломаете свой блок.
- Если светодиод на передней панели не горит, значит ножки подключены неправильно. Просто поменяйте провода местами и он должен загореться.
- Некоторые современные блоки питания имеют провод «Сигнал обратной связи стабилизатора», который должен быть подключен к источнику питания для работы блока. Если провод серый, подключите его к оранжевому проводу, если он розовый, подключите его к красному проводу.
- Силовой резистор с высокой мощностью может довольно сильно нагреваться; вы можете использовать радиатор, чтобы охладить его, но убедитесь, что он не создает КЗ.
- Если вы решили монтировать детали внутрь корпуса, вентилятор можно установить снаружи, чтобы освободить немного места.
- Вентилятор может шумно работать, ведь он питается от 12В. Так как это не компьютер, который сильно нагревается, можно обрезать красный провод вентилятора и подключить оранжевый 3,3 В. Следите за температурой после этого. Если она слишком большая, подключите обратно красный провод.
Поздравляю! Вы успешно сделали ваш блок питания.