
Загрузить PDF
Загрузить PDF
Все, что вам нужно, чтобы сделать свои собственные 3D фотографии, это камера и программное обеспечение для фото-редактирования. Это руководство познакомит вас с процессом подготовки 3D фотографий, используя бесплатное программное обеспечение для персонального компьютера. Программа StereoPhoto Maker (SPM) — это бесплатная программа для Windows и Intel/PowerPC Mac, которая допускает подрезание и выравнивание пары стерео изображений (далее стерео-пара), чтобы сделать их подходящими для комфортного 3D просмотра. После того как они будут приведены в соответствие, вы сможете сохранить их во множестве форматов просмотра, включая анаглиф — тот, который предполагает использование красно-голубых трехмерных очков. AutoPano работает с StereoPhoto Maker и находит тысячи особенностей на ваших левых и правых фотографиях, что позволяет SPM автоматически приводить в соответствие эти два изображения.
-

Найдите предмет с передним планом и фоном, чтобы фотография имела глубину. Если вы не используете два цифровых фотоаппарата одновременно, вам будет не так уж просто фотографировать натюрморты. Вы можете попросить друга не двигаться между снимками, но вам здорово повезет, если сможете добиться того же от детей или животных. Если вы планируете просматривать 3D фото при помощи красно-голубых очков анаглиф, постарайтесь не фотографировать красные или голубые предметы.
-
[1]
Потом сдвиньте камеру приблизительно на 7 см вправо и сделайте правую фотографию.- Попытайтесь быть последовательными. Если вы один раз сделаете сначала правый снимок, а другой раз сначала левый, то вам будет нелегко разобраться, где какой. Пусть вашим правилом станет всегда первым делать левый снимок.
- Лучше всего поставить камеру на треногу, но в этом случае постарайтесь не сдвинуть камеру при изменении положения треноги для второго снимка.
- Меняя положение, сохраняйте общие границы фото без изменений. Попытайтесь сделать так, чтобы нижние точки фотографий совпадали, чтобы минимизировать вертикальную ошибку.
-
Если вы используете цифровой фотоаппарат, полезно упорядочить изображения для более легкой обработки впоследствии. Создайте папку под названием «3D фото». Внутри нее надо создать несколько папок. Одну можно назвать «Оригинал Правый» или «ОП», другую — «Оригинал Левый» или «ОЛ». Создайте еще одну папку под названием «Анаглиф» и возможно еще одну «Рядом». Это для хранения вашей законченной работы.
- Переместите изображения со своей камеры в папку «3D фото», и затем распределите правые фотографии в папку «ОП» и левые фотографии в папку «ОЛ». В каждой папке должно быть равное количество фотографий.
- Переименуйте файлы. Предположим, вы начали с пяти пар фотографий. Вы могли бы назвать их Фото1-Л, Фото1-П, Фото2-Л, Фото2-П, Фото3-Л, Фото3-П и так далее. Если у вас 10 или 20, или 50, или несколько сотен стерео-пар фотографий, переименование их по одной заняло бы много времени. Есть способ переименовать всю папку, полную файлов (мульти-переименование) в SPM, который описан далее в этом пособии.
Реклама
- Переместите изображения со своей камеры в папку «3D фото», и затем распределите правые фотографии в папку «ОП» и левые фотографии в папку «ОЛ». В каждой папке должно быть равное количество фотографий.





-
Идите по адресу SteroPhoto Maker website и вверху вы увидите:
- StereoPhoto Maker Ver4.01 836KByte 22/May/2009
- StereoPhoto Maker Ver4.01 включает файл с подсказками 11087KByte 22/May/2009
-
Программа сама по себе имеет поразительно маленький размер, примерно 700 килобайт. Также существует файл с подсказками, который можно скачать, он имеет размер около 5 мегабайт. В нем есть многообразные иллюстрированные инструкции, он очень рекомендуется к изучению.
-
Появится сообщение с вопросом, не хотите ли вы открыть или сохранить файл с названием «stphmkr310.zip». Нажмите кнопку Сохранить. Затем вас спросят, куда сохранить. Сохраните на Рабочем столе, чтобы легче было потом найти.
-
Папка, содержащая файл «stphmkre.exe», должна открыться. Перенесите ее на свой Рабочий стол так, чтобы позже легче было до нее добраться. Вы можете теперь закрыть окно веб-сайта StereoPhoto Maker.
Реклама




-
Программа будет вести вас, спрашивая, где она может найти левую фотографию, а затем, где она может найти правую фотографию. После того как вы выберете изображения, оба появятся рядом.
-
(K) (Красный квадрат, накладывающийся на синий квадрат). Вы видите окно, на котором показаны оба изображения полупрозрачным образом. Вы можете потянуть одно из них, пока оно не наложится на другое.
- В идеале вы должны добиться того, чтобы эти два изображения отлично совпали вертикально и совпали горизонтально относительно предметов в самом центре фотографии. Совместите эти два изображения, и можете нажимать OK.
- В идеале вы должны добиться того, чтобы эти два изображения отлично совпали вертикально и совпали горизонтально относительно предметов в самом центре фотографии. Совместите эти два изображения, и можете нажимать OK.
-
Многоцветная кнопка слева от вертикальной красно-голубой кнопки покажет ваше фото как анаглиф. После того как вы их сопоставили, нажмите на нее и оденьте 3D очки. Чтобы получить лучшее представление, нажмите на символ, похожий на прямоугольник с X на нем. Это даст вам полноэкранное изображение. После того, как вы достаточно на него насмотрелись, чтобы вернуться к обычному экрану программы, нажмите клавишу Esc. Внесите любые корректировки в соответствие изображений, пока не будете довольны результатом.
-
Выберите Файл, Сохранить стерео фото.
-
Вы можете поменять имя, чтобы в нем не было -Л или -П.
-
Снова, выберите Файл, Открыть Левое/Правое Фото, и подскажите программе какие файлы открыть. Потом выберите Исправление, Авто-расположение. Если она спросит, хотите ли вы использовать файлы предыдущего отчета, всегда нажимайте Нет. Программа проделает свое магическое сравнение этих двух изображений, сопоставляя их настолько хорошо, насколько возможно. Если хотите, можете сохранить эту фотографию тоже, возможно с другим именем. Вы сможете позже посмотреть на эти два изображения и сравнить их.
Реклама







Мультипереименование расположено в меню Файл (Файл > Мультипереименование). Эта функция позволяет вам переименовывать группы фотографий, меняя скриптовые цифровые имена, данные камерами (например, DSC000561) на более полезные имена, такие как Имя001_L и Имя001_R. Даже если были пробелы в оригинальной числовой последовательности из-за удалений, данная функция последовательно переименует их, нумеруя от 1 до общего количества в файле. Это очень полезно. Теперь будет намного легче идентифицировать два изображения, которые формируют стерео-пару, а если вы используете мультиконверсионную функцию в StereoPhoto Maker, то автоматически переименует бесчисленные стерео-пары.
-
Как только вы выбрали Файл, Мультипереименование, появится сообщение.
-
Выберите Полное переименование.
-
-
Предположим, вы сняли несколько фотографий пустыни и/или вы хотите зафиксировать, когда вы их сделали. Например, вы сделали 25 стерео-пар, при этом левые снимки находятся в папке ОЛ, а правые — в папке ОП.
- В поле, которое называется «Стерео», вы можете заменить «Стерео» надписью «Пустыня2014Август» или, по желанию, любым что-то означающим значением.
- В поле нумерации, в котором написано «0001», вы можете заменить «0001» на «01», поскольку вам нужно только двузначное число для 25 изображений.
- В поле, которое содержит «_B.JPG», оставьте «_» и «.JPG», но замените «B» на «Л» или «ОЛ», переименовывая ЛЕВЫЕ файлы, и на «П» или «ОП», переименовывая ПРАВЫЕ файлы. Сделайте это и для левых, и для правых папок изображений, и теперь будет намного легче идентифицировать ваши файлы.
Реклама




Выше мы упомянули Простое выравнивание и Авто-выравнивание, два очень мощных инструмента в SPM. Теперь, чтобы оценить все возможности программы, попробуйте Мультипреобразование.
-
Если вы сделали Мультипереименование папок Левых и Правых фотографий, перед тем как сделать Мультипреобразование, убедитесь, сколько файлов находится в каждой папке. Весьма распространенная ошибка — иметь неравное число файлов в них. Выполнение Мультипреобразования при таких обстоятельствах приведет к беспорядку. Если у вас есть неравное число, возможно, надо просмотреть их, чтобы удалить «случайные» единственные изображения, и затем запустить Мультипереименование снова.
-
В Мультипреобразовании укажите программе, с какими файлами Вы хотите продолжить работать, как вы хотите их сохранять, и где сохранять. Для этого руководства мы предполагаем, что вы начнете с двух независимых файлов фотографий. Поскольку вы становитесь более продвинутыми в работе с StereoPhoto Maker, это может не всегда быть верно, но в целях этого руководства будем считать так.
-
В поле Поиск найдите папку, содержащую Левые изображения, с которыми вы хотите работать. Вам не надо выбирать имя файла или тип файла.
-
Когда вы выберете это, чуть ниже появится поле Папка правого фото.
-
Выберите папку, которая содержит файлы с Правыми изображениями. Оставьте как есть поля Л Нормальные и П Нормальные. Вы использовали бы их, если бы надо было разворачивать изображения.
-
. Согласно нашему руководству по использованию программы выберите Цветной анаглиф.После того, как вы проделали эту преобразовательную последовательность, можете сделать это снова и выбрать Серый анаглиф, Side-by-Side, или Независимый Л/П, но в настоящий момент выберите Цветной анаглиф.
-
В поле Регулировка выберите Авто-выравнивание, Автообрезка после регулирования и Авто регулирование цвета. Есть много других вариантов, которые можете исследовать позже.
-
Это место, куда вы хотите отправлять новые файлы, которые создает программа. Помните в начале этого руководства, мы предложили, чтобы вы создали папку «Анаглиф».
-
Даже если вы не создавали этой папки прежде, еще не слишком поздно. Обратитесь к Windows Explorer, создайте эту папку и перейдите к ней.
-
Если вас спрашивают, хотите ли вы использовать «файлы предыдущего отчета», нажмите на Нет. Теперь, просто наблюдайте, если хотите. Вы не будете видеть какой-то безумной графики, просто компьютер, быстро совершая свои шаги, пытается понять ваши стерео-пары. В зависимости от скорости и конфигурации вашего компьютера это может занять от 5 секунд до 3 минут за пару.
-
Программа автоматически отрегулирует изображения для правильного стерео окна, исправит вращение изображения, различия в размере и вертикальные различия. Если вы аккуратно сфотографировали эти два изображения, не должно быть никаких проблем с большинством изображений, которые будут получены в итоге.
-
Вы можете сохранить установки, с которыми вы работали, так, чтобы в следующий раз, когда запустите Мультипреобразование, вам снова не пришлось нажимать все поля, о которых мы говорили. Просто нажмите на Сохранить справа внизу окна и дайте ему имя. Чтобы использовать эти установка в другой раз, нажмите на Восстановить (Файл) и выберете файл, который вы сохранили.
Реклама












Советы
- Попытайтесь сделать свои собственные очки из небольшого количества тонкого картона и красно-синего (голубого) ацетата.
- Если у вас версия 3.x, обновите до 4.01. Текущая версия содержит AutoPano в программном обеспечении.
Реклама
Источники
Об этой статье
Эту страницу просматривали 16 731 раз.
Была ли эта статья полезной?
Какой стереофотограф не любит программу StereoPhoto Maker !
Сделала визуальные руководства к программе StereoPhoto Maker для новичков и для тех, кто, может быть, не знает некоторых возможностей этой программы:
https://www.youtube.com/watch?v=Ahz8_91G6hw&index=1&list=PLJ1xZqVGEz2VydR8ZiTao_AqvY57-hbnW&t=1s
Заодно поизучала trial-ную версию Camtasia Studio, классная программа, но стоит 200 долларов.
360-градусный контент может впечатлить любого зрителя, но он же в формате 3D выходит на еще более высокий уровень. При этом 3D-съемка на 360 градусов – удовольствие не для каждого, ведь хорошие 3D-камеры весьма дороги и зачастую сложны в использовании. Впрочем, есть бесплатное ПО Stereo Photo Maker, которое позволит снять простые 3D-фотопанорамы при помощи обычной панорамной 2D-камеры, например Ricoh Theta V.
Старая альтернатива
Ранее снять 3D-панораму с помощью двух или одной Ricoh Theta можно было только в ручном режиме, отнимавшем очень много времени. Необходимо взять два снимка, сделанных на расстоянии около 65 мм друг от друга по горизонтали, поменять правый и левый задние виды в определенной последовательности, а затем объединить два файла в один в Photoshop. Это требует определенных навыков и кропотливой работы, так что появление нового ПО существенно упрощает жизнь фотографам-любителям.
Stereo Photo Maker – бесплатное программное обеспечение, которое имеет функцию автоматизации процесса 3D-съемки на простую 2D-камеру. Инструкцию по работе с данной опцией можно посмотреть ниже:
Умеет Stereo Photo Maker работать и с форматом little planet. Туториал доступен ниже:
Ограничения
Несмотря на всю простоту и качество конечного результата, у 3D-панорам, созданных в Stereo Photo Maker, есть один существенный недостаток – они трехмерны только в двух направлениях. К сожалению, для эффекта трехмерности по четырем направлениям необходимо использовать полноценную 360-градусную 3D-камеру с объективами, смотрящими на все четыре стороны, например Insta360 Pro или Vuze Camera.
Где разместить готовый 3D-снимок
Для размещения отредактированных 360-градусных 3D-панорам лучше всего использовать сервис Veer, который имеет полноценную поддержку сферических фотографий и видеороликов, как в 2D, так и в 3D-формате. Затем загруженный контент можно легко экспортировать в соцсети или в блог на практически любой интернет-площадке. Ниже представлена панорама с Veer, снятая на камеру Insta360 Pro. Для перехода в режим 3D нажмите соответствующий значок в правом нижнем углу.
Подписаться. Без рекламы
Последние события из мира панорамных технологий: анонсы, рейтинги, слухи, аналитика, новости сопутствующих технологий и все что связанно с 360.
Подписывайтесь в Telegram, Вконтакте, Facebook и YouTube!
This post describes how to automatically generate depth maps with StereoPhoto Maker. Masuji Suto, the author of StereoPhoto Maker, has integrated two of my tools, DMAG5 and DMAG9b, into StereoPhoto Maker in order for StereoPhoto Maker to be able to generate depth maps. If you don’t want to use StereoPhoto Maker at all to generate depth maps, you can certainly use my tools directly: Epipolar Rectification 9b (ER9b) or Epipolar Rectification 9c (ER9c) to rectify/align the stereo pair, Depth Map Automatic Generator 5 (DMAG5) or Depth Map Automatic Generator 5b (DMAG5b) to generate the (initial) depth map, and Depth Map Automatic Generator 9b (DMAG9b) to improve the depth map. All those programs can be downloaded through the 3D Software Page.
I recommend using my stereo tools directly but I understand the convenience StereoPhoto Maker might offer, which is why I wrote this post. The issue I have with StereoPhoto Maker is the rectifier which not only aligns the stereo pair but also can provide the min and max disparities needed by the automatic depth map generator. I have no control over that part in StereoPhoto Maker and that bothers me a little bit. Just be aware that, to get good depth maps, it is quite important to have a properly rectified stereo pair and correct min and max disparities.
Be extremely careful about accepting the min and max disparity values (aka the background and foreground values) that StereoPhoto Maker can automatically provide! I strongly recommend you do that part manually. If the values differ a lot (the ones found automatically and the ones found manually), I would be quite suspicious about the proper rectification/alignment of the stereo pair. In that case, I would suggest using ER9b or ER9c to rectify, or if you are really keen on using StereoPhoto Maker, checking the «Better Precision (slow)» box under «Edit->Preferences->Adjustment» to get better rectification. Also, be extremely careful about StereoPhoto Maker resizing your stereo pair because of what’s in «maximum image width»! I would not let StereoPhoto Maker resize the stereo pair and instead make sure that the stereo pair you are processing is under what’s in «maximum image width».
Alrighty then, let’s get back to the business hand, that is, generating depth maps with StereoPhoto Maker. I am assuming that you have installed StereoPhoto Maker and the combo DMAG5/DMAG9b on your computer. If you haven’t done so yet, follow the instructions in How to make Facebook 3D Photo from Stereo pair. I am assuming you have downloaded and extracted the DMAG5/DMAG9b stuff in a directory called dmag5_9. That directory should look like so:

Contents of the dmag5_9 directory.
Because alignment of the stereo pair is of prime importance in depth map generation, I recommend going into «Edit->Preferences->Adjustment» and checking the box that says «Better Precision (slow)». As I don’t particularly like large images, the first thing I do after loading the stereo pair is to resize the images to something smaller. In this guide, the stereo pair is an mpo coming from a Fuji W3 camera. The initial dimensions are 3441×2016. You could generate the depth maps using those dimensions but everything is gonna take longer. Clicking on «Edit->Resize», I change the width to 1200. I guess I could have resized to something larger but I wouldn’t resize to anything larger than 3000 pixels. Once the stereo pair has been resized, I click on «Adjust->Auto-alignment» to align/rectify the images. As an alternative to SPM’s alignment tool, you can use my rectification tools: Epipolar Rectification 9b (ER9b) or Epipolar Rectification 9c (ER9c).
To generate the depth map, I click on «Edit->Depth Map->Create depth map from stereo pair» where I am presented with this window:
Default «Create depth map from stereo pair» window.
What I recommend doing is getting the background and foreground disparity values manually first. To get the background value, use the arrow keys so that the two red/cyan views come into focus (merge) for a background point. Same idea for the foreground value. I keep track of those two values and then click on «Get Values (automatic)». If the automatic values make sense when compared to the ones obtained manually, I just leave them be. If they don’t, I edit them and put back the values obtained manually. Since my image width is less than 3000 pixels, I don’t bother with the «maximum image width» box. I don’t like the idea of SPM resizing the images automatically so I always make sure that my image width is less than what it’s in the «maximum image width» box. The reason I don’t like the idea of SPM resizing my images is because, if you change the image dimensions, you are supposed to also change the min and max disparity, and I am not sure SPM does it. So, beware! As an alternative to having SPM compute the min and max disparities, you can use my rectification tools: Epipolar Rectification 9b (ER9b) or Epipolar Rectification 9c (ER9c). They both give you the min and max disparities in their output. I only want the left depth map so I keep the «Create left/right depth maps» unchecked. Since I want white to be for the foreground and black for the background (I always use white for the foreground in my depth maps), I click on «Create depth map (front: white, back: black)». Note that because I clicked on «Create depth map (front: white, back: black)», when it is time to save the depth map by going into «Edit->Depth map->Save as Facebook 3d photo (2d photo+depth)», I will need to click on «white» for the «Displayed depth map front side->white» so that the depth map does not get inverted when saved by SPM. If you don’t mind a depth map where the foreground is black, then leave the «Create depth map (front: white, back: black)» radio button alone and don’t click on it.
I recommend using the default parameters in DMAG5 (on the left) and DMAG9b (on the right) to get the first depth map (as you may need to tweak the parameters to get the best possible depth map). To be sure I have the default settings (SPM stores the latest used settings), I click on «Default settings». To get the depth map, I click on «Create depth map». This is the result:

Left image and depth map produced by SPM.
To get the left image on the left and the depth map on the right, click on the «Side-by-side» icon in the taskbar. For more info on DMAG5, check Depth Map Automatic Generator 5 (DMAG5). For more info on DMAG9b, check Depth Map Automatic Generator 9b (DMAG9b) and/or have a look at dmag9b_manual.pdf in the dmag5_9 directory.
Now, if you go into the dmag5_9 directory, you will find some very interesting intermediate images:
— 000_l.tif. That’s the left image as used by DMAG5.
— 000_r.tif. That’s the right image as used by DMAG5.
— con_map.tiff. That’s the confidence map computed by DMAG9b. White means high confidence, black means low confidence. If you clicked on «Create left/right depth maps», the confidence map gets overwritten when DMAG9b is called to optimize the right depth map.
— dps_l.tif. That’s the left depth map produced by DMAG5.
— dps_r.tif. That’s the right depth map produced by DMAG5. Even if the «Create left/right depth maps» box is unchecked, the right depth map is always generated by DMAG5 in order to detect left/right inconsistencies in the left depth map.
— out.tif. That’s the depth map produced by DMAG9b. DMAG9b uses the depth map generated by DMAG5 as input and improves it. If you clicked on «Create left/right depth maps», there should be out.tif (left depth map) and out_r.tif (right depth map).
The depth map «out.tif» is basically the same as the depth map that you get by clicking on «Edit->Depth map->Save as Facebook 3D photo (image+depth)».
It should be noted that once you have created a depth map, you cannot re-click on «Edit->Depth map->Create depth map from stereo pair», possibly change parameters, and create another depth map. If you do that, the new depth map is basically going to be garbage because the right image has been replaced by the previously created depth map (take a look at 000_r.tif in the dmag5_9 directory to convince yourself). To re-generate the depth map, you need to undo or reload the stereo pair.
At this point, you may want to play with the DMAG5/DMAG9b parameters to see if you can improve the depth map. I think it’s a good idea but be aware there may be areas in your image where the depth map cannot be improved upon. For instance, if you have an area that has no texture (think of a blue sky or a white wall) or an area that has a repeated texture, it is quite likely the depth map is gonna be wrong no matter what you do. So, improving the depth map is not always easy as, usually, some areas will get better while others will get worse. Some parameters like DMAG5 radius or DMAG9b sample rate spatial depend on the image dimensions and should kind of be tailored to the image width. I think it’s best to change one parameter at a time and see the effect it has on the depth map. If things get better, keep changing that parameter (in the same direction) until things get worse. Then, you tweak the next parameter. Of course, it is up to you whether or not you want to spend the time tinkering with parameters. If you always shoot with the same camera setup, this tinkering may only need to be done once.
Let’s see which parameters used by DMAG5 and DMAG9b are worth tinkering with in the quest for a better depth map. I believe changing the sample rate spatial used by DMAG9b from the default 32 to 16 or even 8 should be the first thing to change when trying to improve the depth map. I think the default 32 is probably too large especially if the image width is not that large (like here for our test case).
What DMAG5 parameters (on the left side of the window) give you the most bang for your bucks when trying to improve the mesh quality?
— radius. The larger the radius, the smoother the depth map generated by DMAG5 is going to be but the less accurate. As the radius goes down, more noise gets introduced into the depth map.
— downsampling factor. The larger the downsampling factor, the faster DMAG5 will run but the less accurate. Running DMAG5 using a downsampling factor of 2 is four times faster than running DMAG5 using a downsampling factor of 1 (no downsampling).
Note that those observations concern DMAG5 only. So, you should look at the dps_l.tif file to see the effects of changing DMAG5 parameters. Also, you may find that sometimes the depth map generated by DMAG5 is actually better than the one generated by the combo DMAG5/DMAG9b. Note that DMAG9b can be so aggressive that variations in the depth map produced by DMAG5 do not matter much.

Left depth map generated by DMAG5 (dps_l.tif) using default values.
What happens to the left depth map generated by DMAG5 if you change the radius from 16 to 8 (every other parameter set to default)? Let’s find out!
«Create depth map from stereo pair» window. Changed DMAG5 radius from 16 to 8 (every other parameter set to default).

Left depth map generated by DMAG5 (dps_l.tif). Changed DMAG5 radius from 16 to 8 (every other parameter set to default).
What happens to the left depth map generated by DMAG5 if you change the downsampling factor from 2 to 1 (every other parameter set to default)? Let’s find out!
«Create depth map from stereo pair» window. Changed DMAG5 downsampling factor from 2 to 1 (every other parameter set to default).

Left depth map generated by DMAG5 (dps_l.tif). Changed DMAG5 downsampling factor from 2 to 1 (every other parameter set to default).
What DMAG9b parameters (on the right side of the window) give you the most bang for your bucks when trying to improve the mesh quality?
— sample rate spatial. The larger the sample rate spatial, the more aggressive DMAG9b will be. I recommend going from 32 (default value) to 16, 8, and even 4. If you can clearly see «blocks» in your depth map, the sample rate spatial is probably too large and should be reduced (by a factor of 2).
— sample rate range. The larger the sample rate range, the more aggressive DMAG9b will be. The default value is 8 but you can try 4 or 16 and see if it’s any better.
— lambda. The larger the lambda, the smoother the depth map is going to be (in other words, the more aggressive DMAG9b will be). The default value is 0.25 but you can certainly try larger or smaller values. If you don’t want the output depth map to be too different from the depth map generated by DMAG5 (dps_l.tiff), use smaller values for lambda (you will probably also need to use smaller values for the sample rate spatial and the sample rate range).

Depth map generated by DMAG9b (out.tif) using default values.
What happens to the depth map generated by DMAG9b if you change the sample rate spatial from 32 to 16 (every other parameter set to default)? Let’s find out!
«Create depth map from stereo pair» window. Changed DMAG9b sample rate spatial from 32 to 16 (every other parameter set to default).

Depth map generated by DMAG9b (out.tif). Changed DMAG9b sample rate spatial from 32 to 16 (every other parameter set to default).
What happens to the depth map generated by DMAG9b if you change the sample rate range from 8 to 4 (every other parameter set to default)? Let’s find out!
«Create depth map from stereo pair» window. Changed DMAG9b sample rate range from 8 to 4 (every other parameter set to default).

Depth map generated by DMAG9b (out.tif). Changed DMAG9b sample rate range from 8 to 4 (every other parameter set to default).
What happens to the depth map generated by DMAG9b if you change lambda from 0.25 to 0.5 (every other parameter set to default)? Let’s find out!
«Create depth map from stereo pair» window. Changed DMAG9b lambda from 0.25 to 0.5 (every other parameter set to default).

Depth map generated by DMAG9b (out.tif). Changed DMAG9b lambda from 0.25 to 0.5 (every other parameter set to default).
Video version of this post about generating depth maps in SPM:
Another shorter video:
Now, if you want to manually edit/fix the generated depth map, you can do so in SPM by clicking on «Edit->Depth map->Correct depth map». If you want to edit the generated depth map semi-automatically, you can use the techniques centered around DMAG11 or DMAG4 that are described in Case Study — How to get depth maps from old stereocards using ER9c, DMAG5, DMAG9b, and DMAG11 and Case Study — How to improve depth map quality with DMAG9b and DMAG4.
For the ultimate experience in editing depth maps semi-automatically, I recommend using 2d to 3d Image Conversion Software — the3dconverter2: load up the left image and the depth map (add an alpha channel if it does not have one), use the eraser tool to delete parts in the depth map you do not like (that becomes sparse_depthmap_rgba_image.png needed by the3dconverter), create a new layer and trace where you don’t want the depths to bleed through (that becomes edge_rgba_image.png needed by the3dconverter), and run the3dconverter to get the new depth map called dense_depthmap_image.png. You do not to worry or care about gimp_paths.svg, ignored_gradient_rgba_image.png, and emphasized_gradient_rgba_image.png as they are not needed.
Video tutorial that explains how to use the3dconverter2 to edit depth maps:
Для обработки стереофотографий есть множество программ, например: Adobe Photoshop, Anaglyph Maker, Z-anaglyph, StereoPhotoMaker и др. Рассмотрим бесплатную программу StereoPhotoMaker.
Скачать ее можно по адресу: http://stereo.jpn.org/eng/stphmkr/
Примечания:
На момент написания статьи последняя версия программы 4.34. Поэтому если вы используете другую версию, возможны некоторые отличия.
Программа имеет довольно много настроек по работе с 3D фотографиями. В рамках данной статьи будут рассмотрены лишь основы. С дополнительными настройками вы можете ознакомиться самостоятельно.
Программа не требует установки, поэтому сразу после скачивания и распаковки архива запускаем ее.
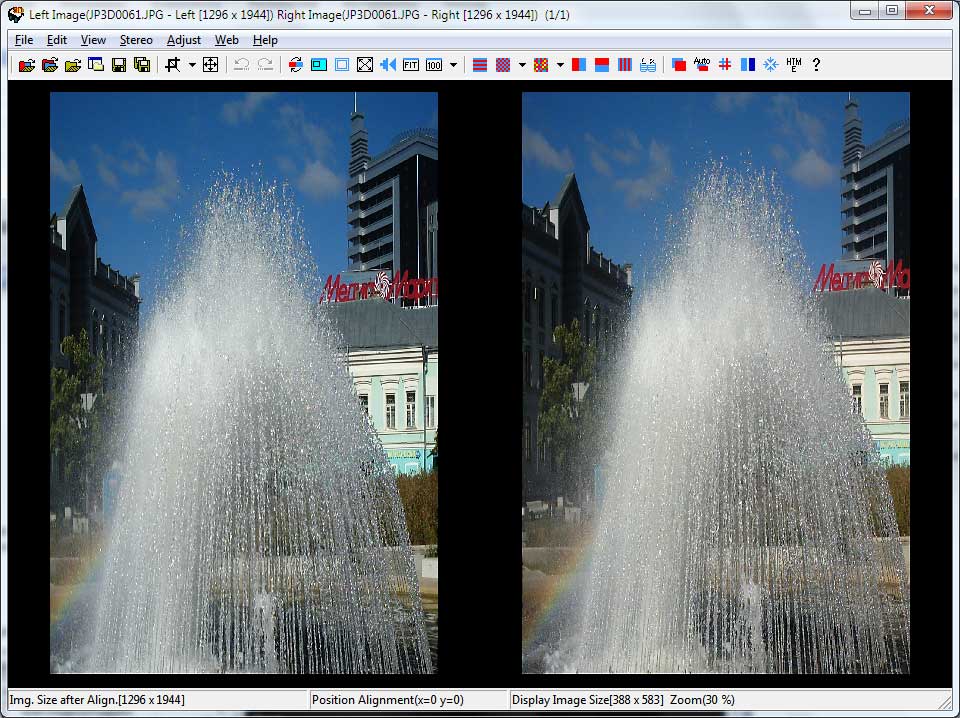
Для того, чтобы открыть стереоизображение щелкаем меню File -> Open Stereo Image… Выбираем фотографию. Настройки Stereo Format оставляем по умолчанию (Side-by-side). И нажимаем на кнопку «Открыть».
Для многих функций из меню на панели инструментов имеются кнопки быстрого доступа. Для того, чтобы узнать, назначение каждой кнопки, достаточно навести курсор мыши на кнопку и через секунду появится всплывающая подсказка с названием функции, которая соответствует названию функции в меню.
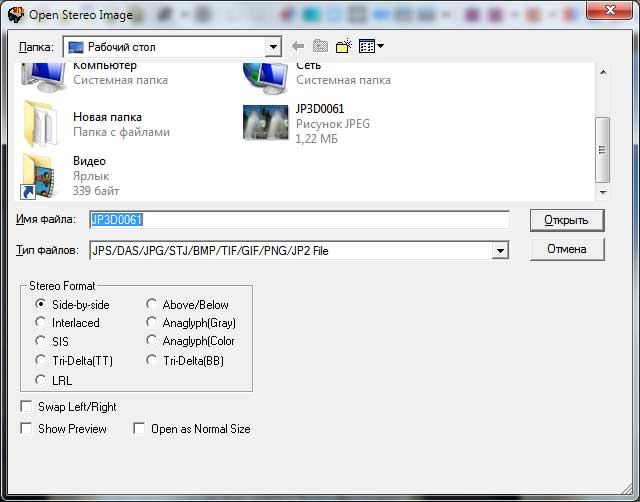
Как правило стереофотоаппараты сохраняют стерео пары таким образом, что ширина изображения уменьшается вдвое, из-за чего кажется, будто фотография вытянута (т. н. анаморфная стереопара).
Для изменения пропорций запускаем в меню Edit -> Resize. В разделе Aspect-ratio выбираем Don’t keep Aspect-ratio. И меняем значение X (ширина) на удвоенное значение. Например, в нашем случае ширина оригинального изображения составляет 1296 пикселей, умножаем ее на 2 и записываем в поле X получившееся значение 2592. Нажимаем на кнопку OK.
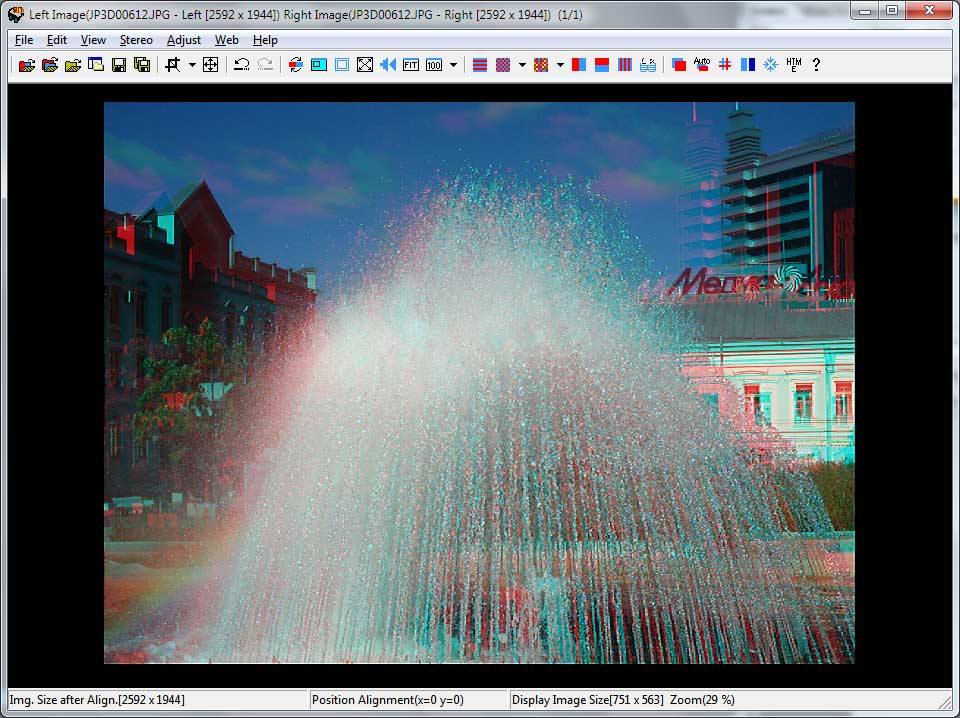
После этого достаточно выбрать меню Stereo -> ColorAnaglyph -> color(red/cyan). После этого программа выполнит автоматическое сведение.
При желании можно выполнить ручную регулировку сведения ракурсов. Для этого запускаем диалог из меню Adjust -> Easy Adjustment
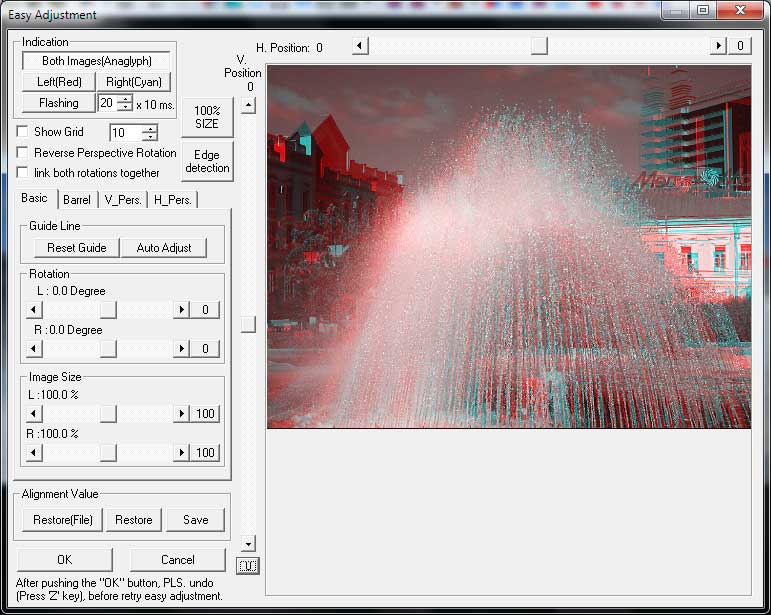
В общем случае никаких настроек менять не нужно. Однако для достижения особых эффектов можно изменить сведение с помощью линий прокрутки (V.Position по вертикали и H.Position по горизонтали, кнопками на концах линий прокрутки) можно сдвинуть одно изображение относительно другого. Обычно сведение всегда производится по переднему плану. При сведении по переднему плану весь объем уходит вглубь фотографии.
Однако в некоторых случаях целесообразно сводить по среднему плану. Автор следующей фотографии сумел добиться отличного эффекта. Если бы фотография была сведена по переднему плану (по концам бревен), то фотография была бы самой обычной и ничем не выделяющейся. Однако автор свел ее по дальним торцам, и бревна, что подлиннее, вышли за пределы фотографии.

По заднему же плану сведение выполнять не рекомендуется.
После получения приемлемого изображения необходимо сохранить его. Для этого выбираем меню File -> Save Stero Image, выбираем папку, вводим имя файла и нажимаем на кнопку «Сохранить». Стерео-анаглиф изображение готово.